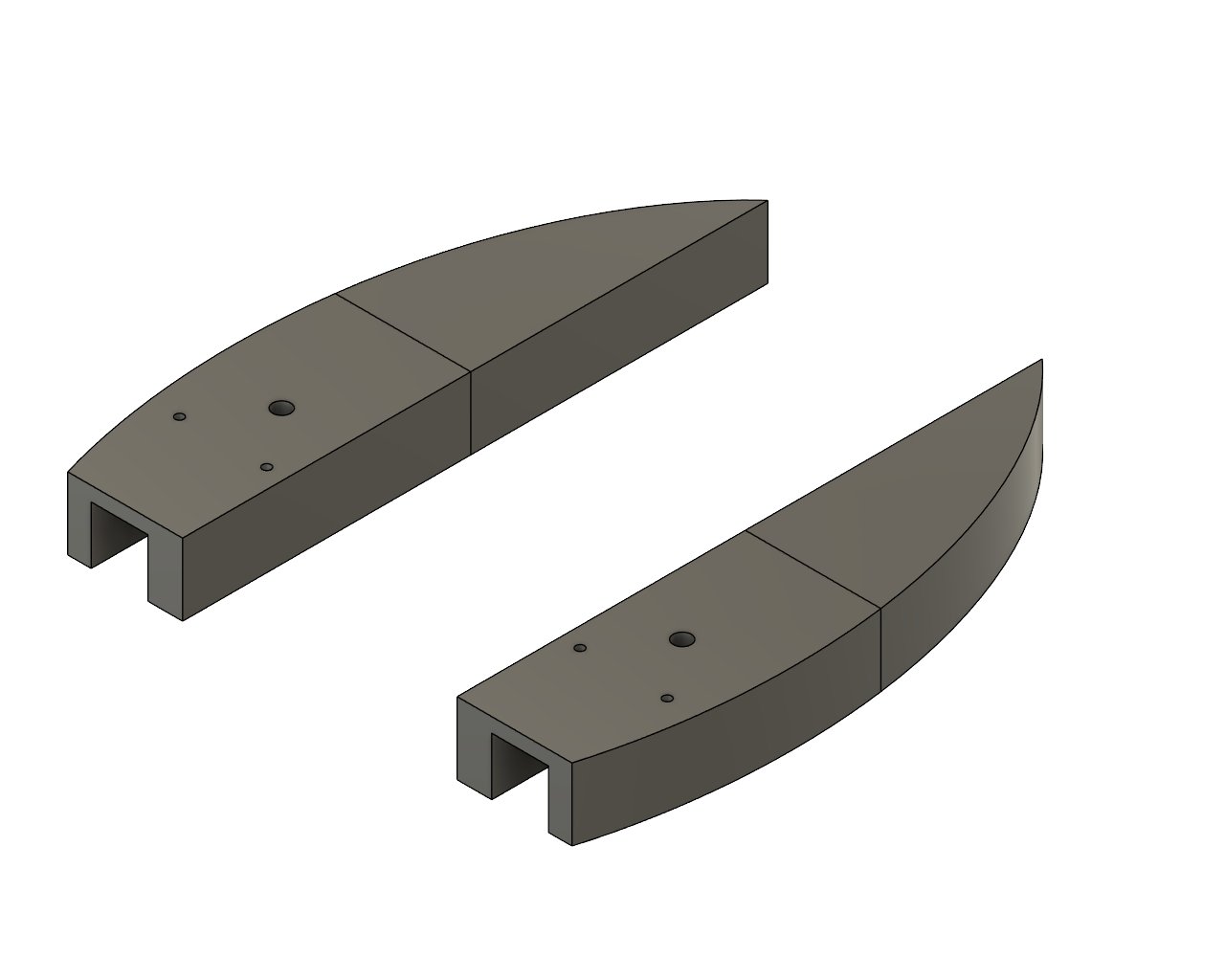
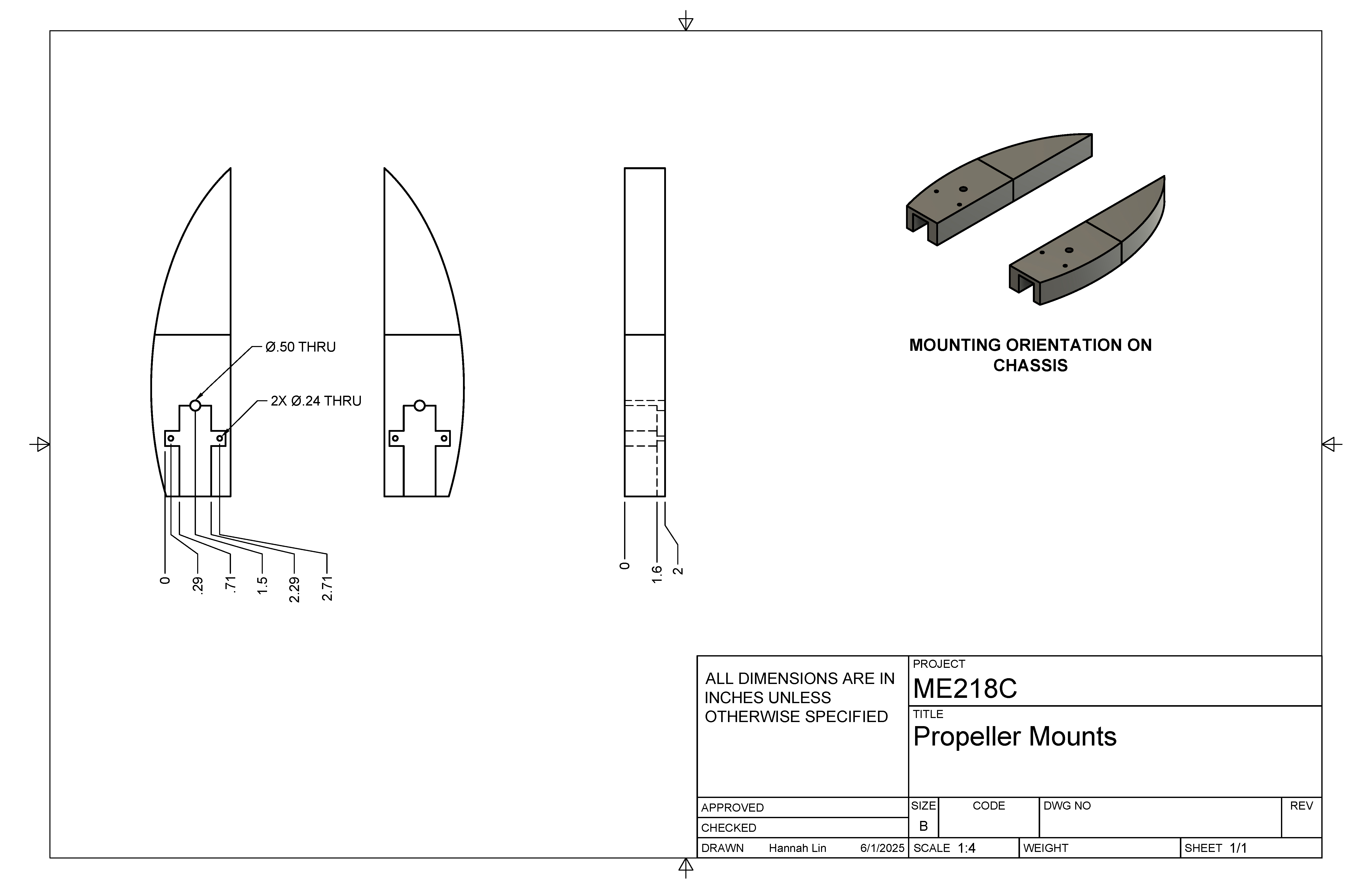
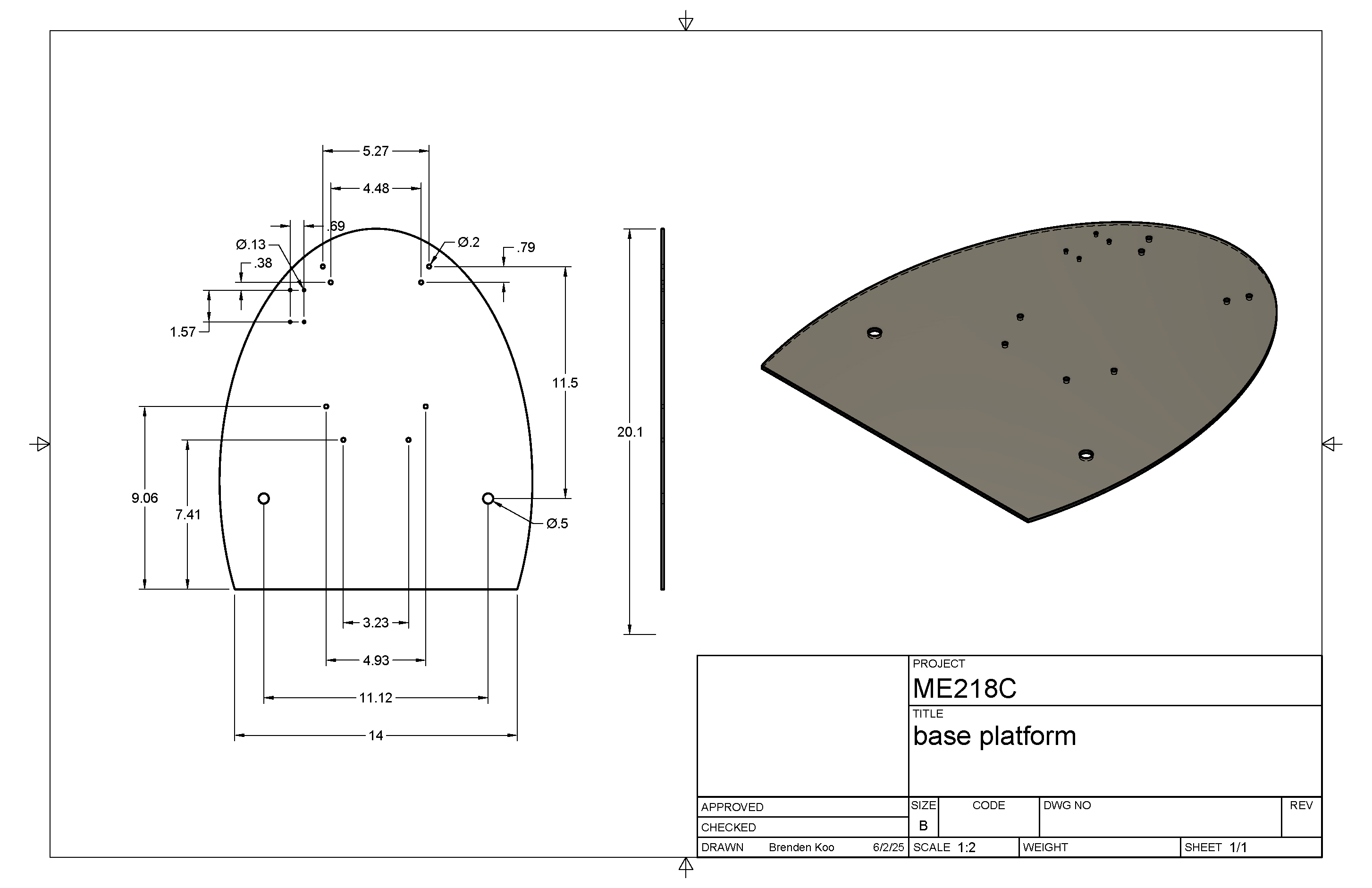
The BARNACOAL’s main purposes are to: maneuver through the water; to carry and dispense COAL; and to house all onboard electronics while protecting critical components from water. To start, we laser cut a clear acrylic sheet to create a base place. Our initial prototype featured a Duron base plate and foam, and while the Duron was overall functional, acrylic was more aesthetic and still more water-resistant. The acrylic was cheap, could withstand water, and readily available. To the bottom side of the base plate, we first attached two pieces of custom cut foam to provide buoyancy. Beneath the foam, we affixed two 3D printed pieces that mainly served as propeller mounts. As seen in the image to the right, the propellers are attached to DC brushed motors encased in a waterproof housing. Using a flexible U-ring and two #6-screws, we were able to mount the motor propeller unit to the bottom of the chassis to ensure that the propellers were fully submerged in the water.
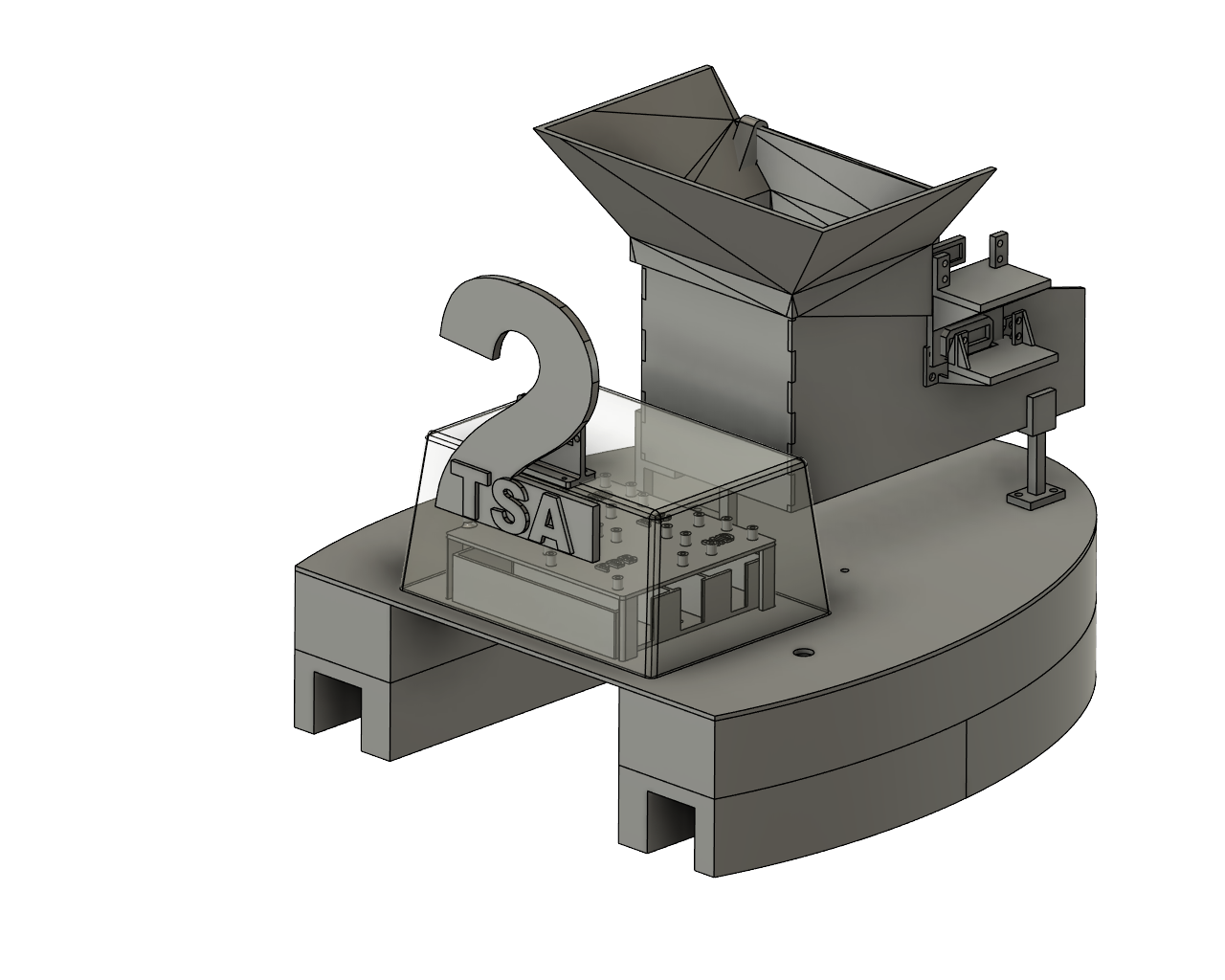
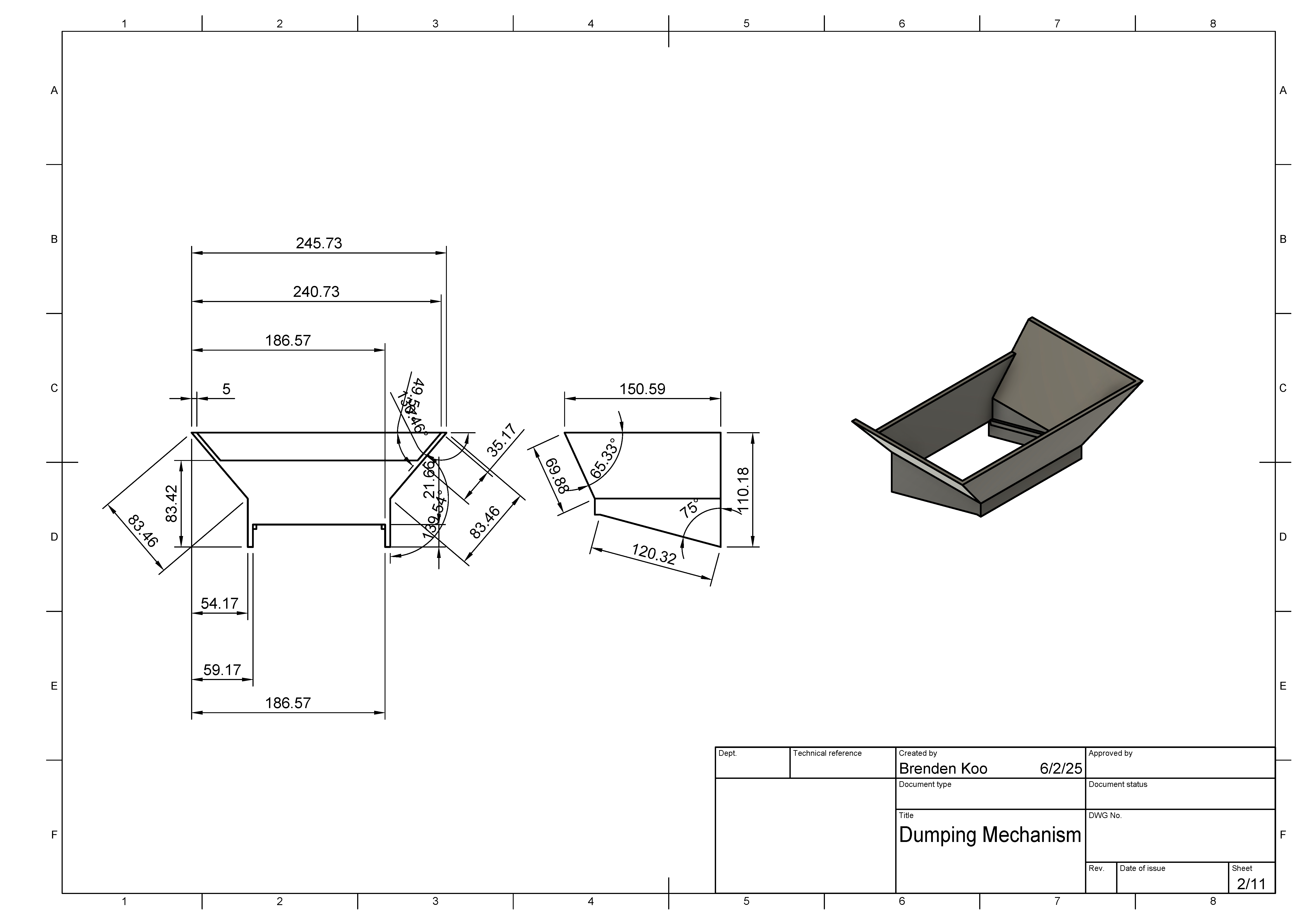
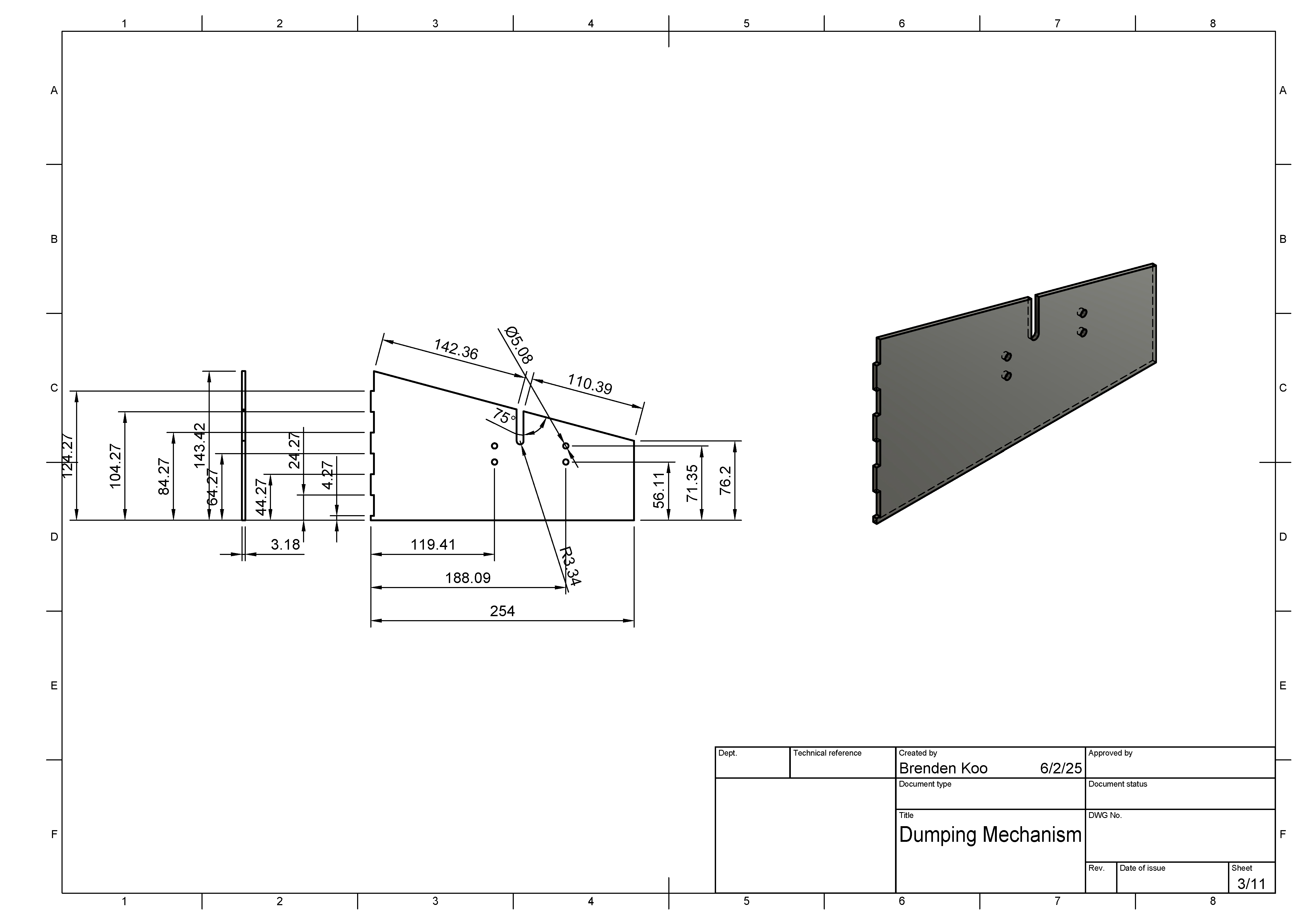
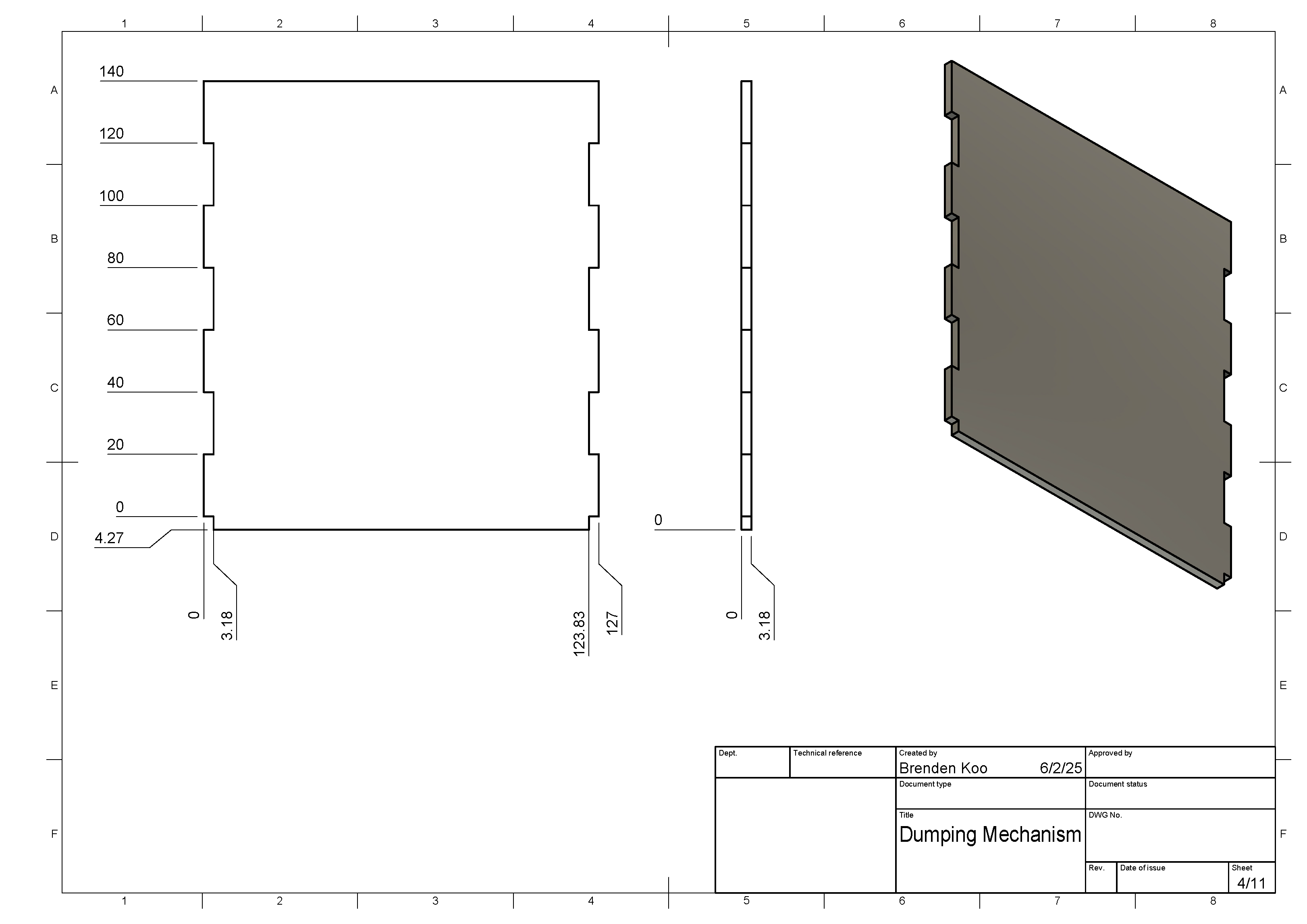
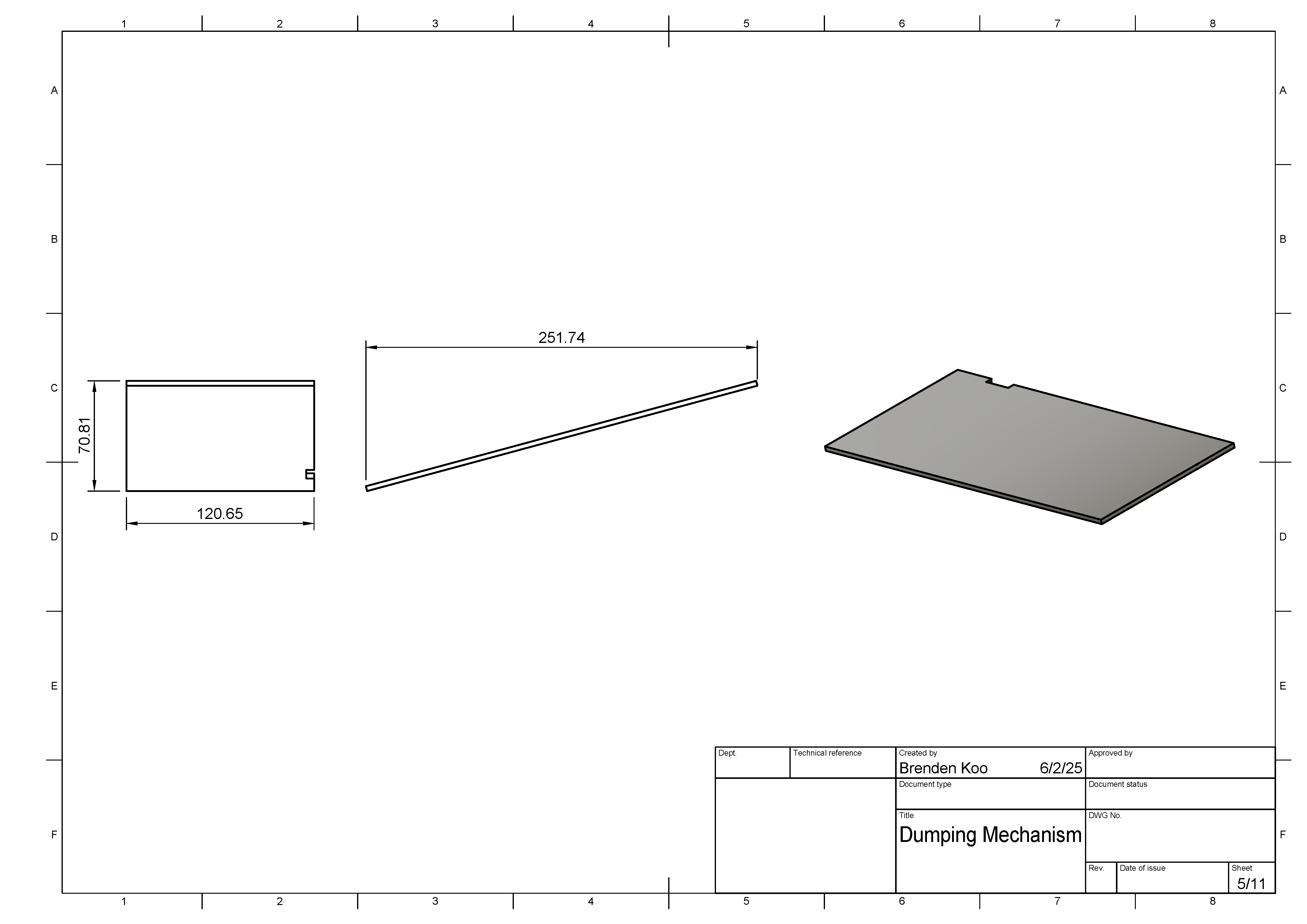
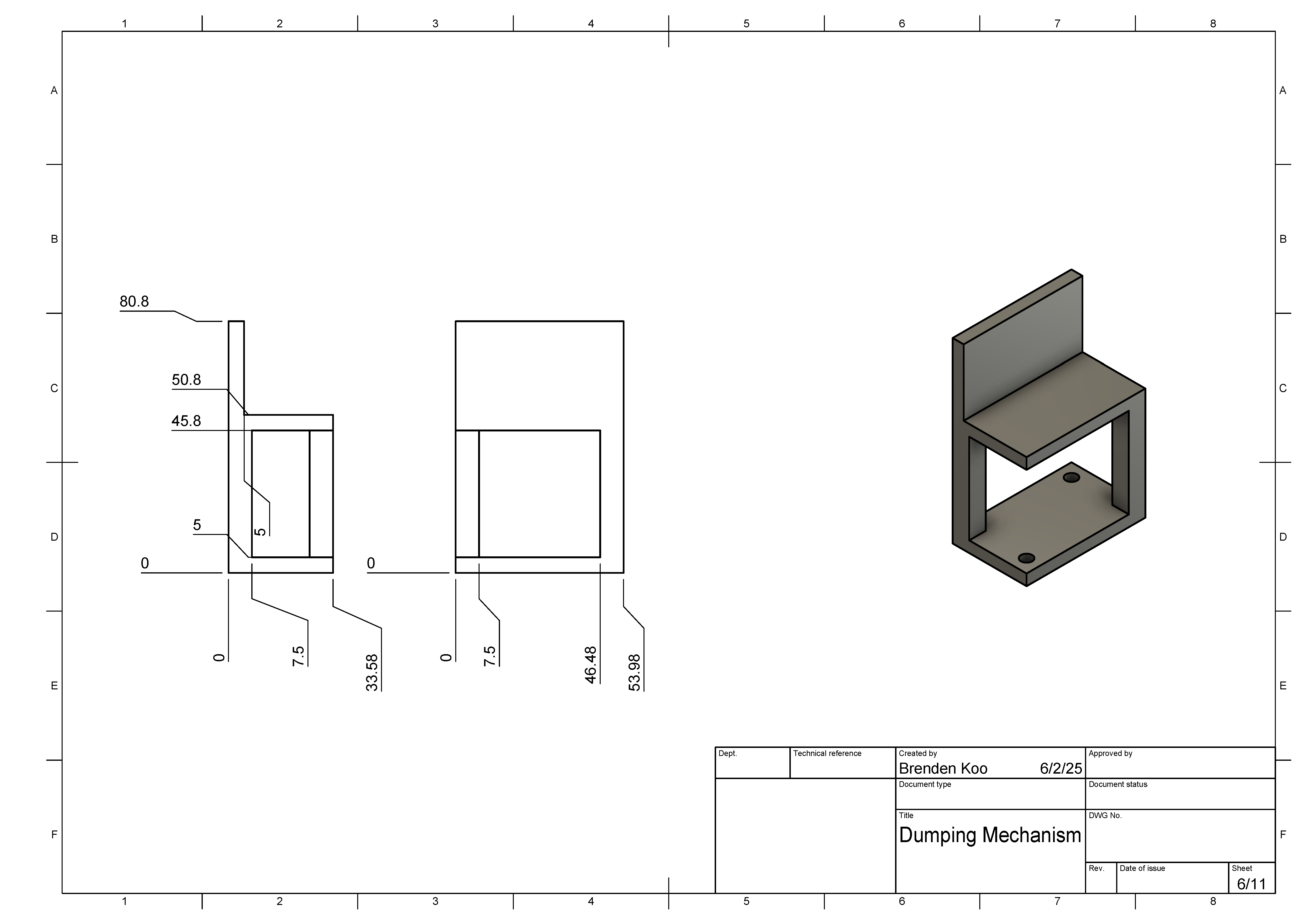
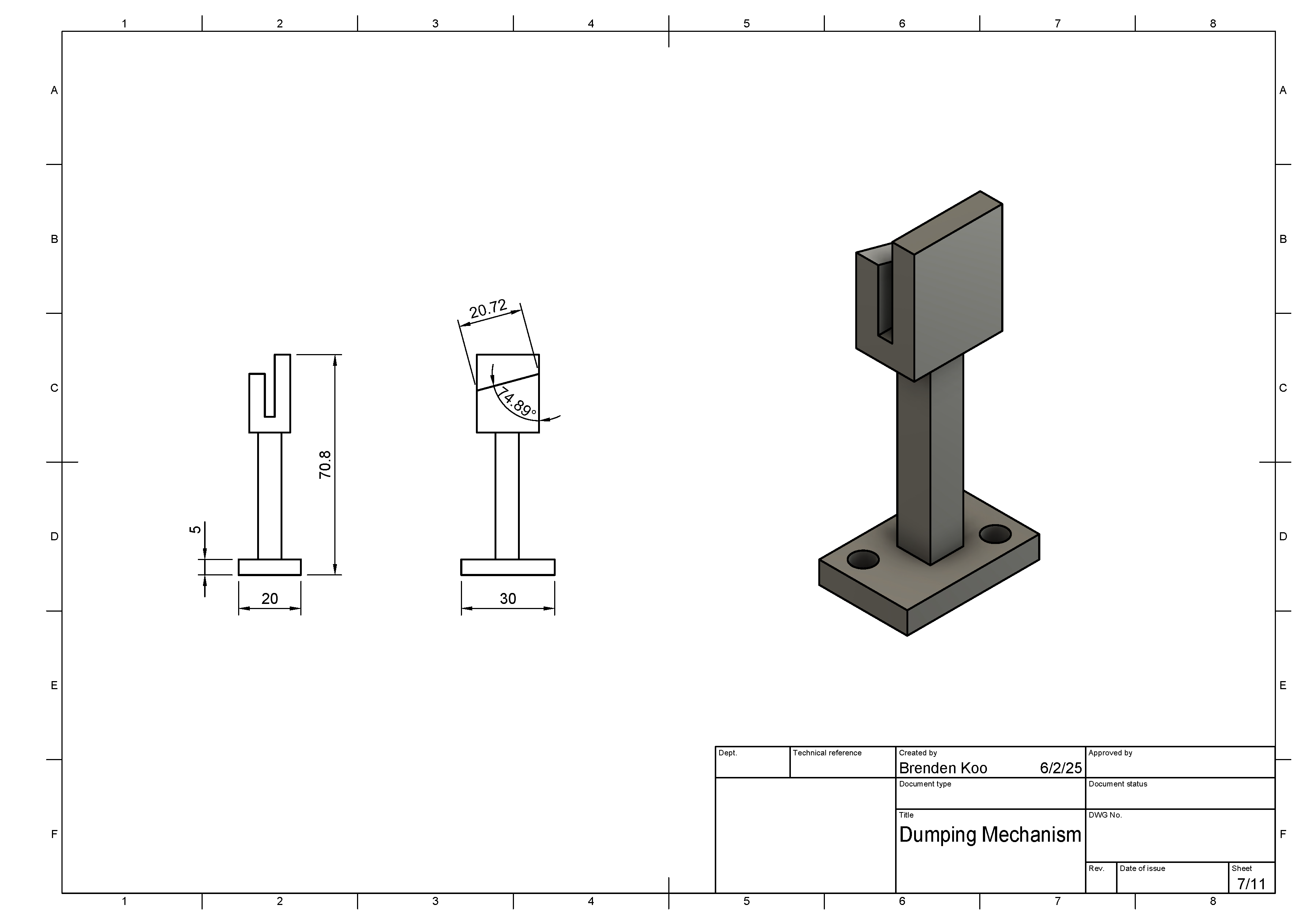
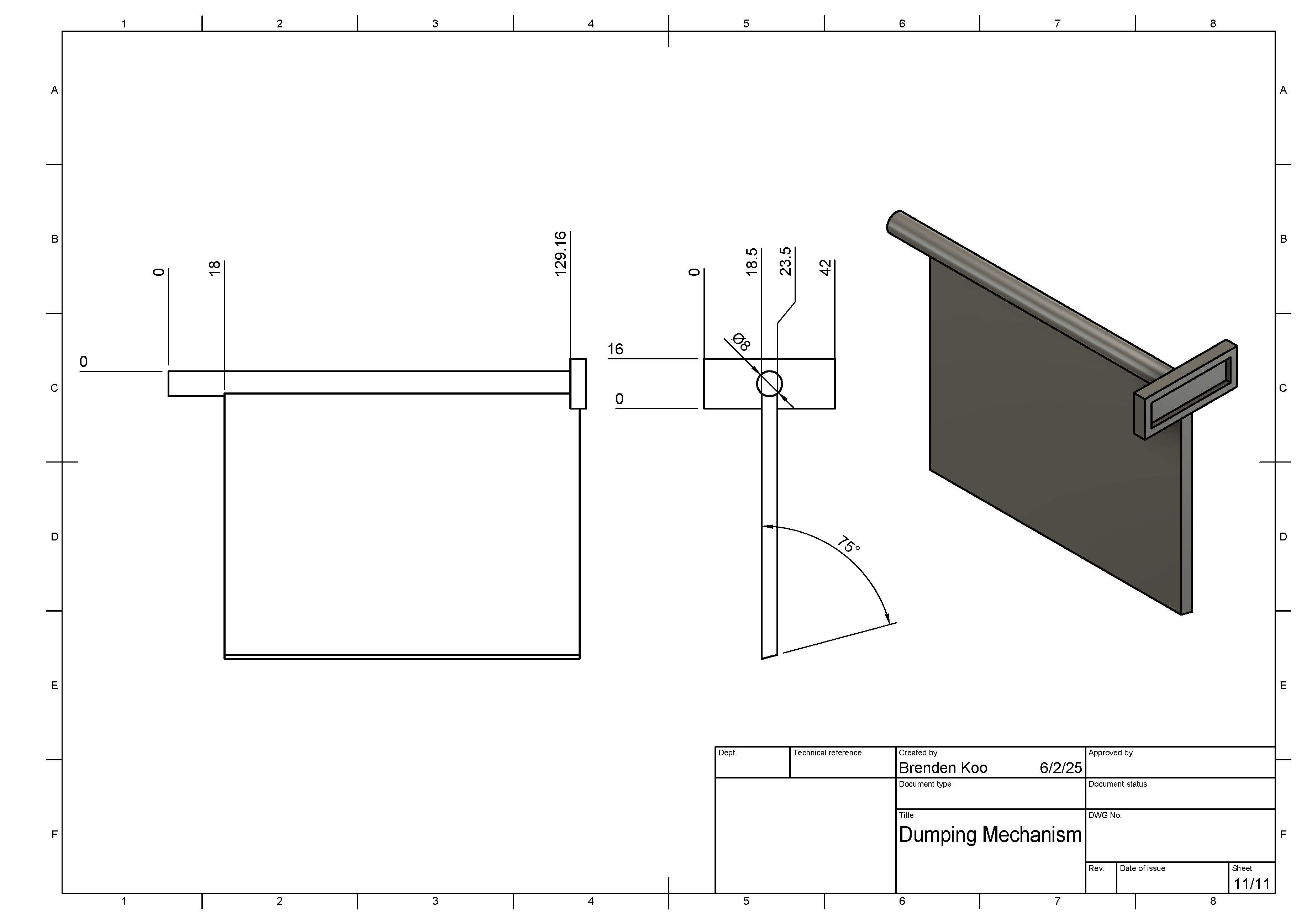
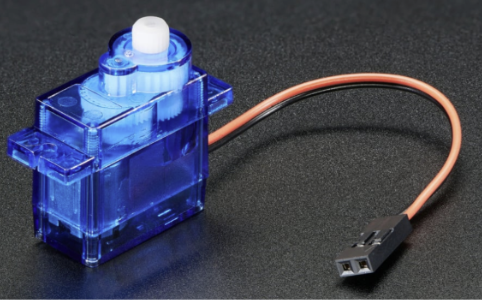
The COAL dump mechanism and anchor both sit towards the front of the BARNACOAL. The dump mechanism was created using a combination of laser cut acrylic and 3D printed parts and features a top-hinged flat, activated by an HS-322HD motor. At the start of the game, the hinged door stays closed, holding in the COAL until we are ready to dispense everything into the RECEPTACOAL. The funnel at the top facilitates COAL reloading, since we were not allowed to get into the pool while reloading.



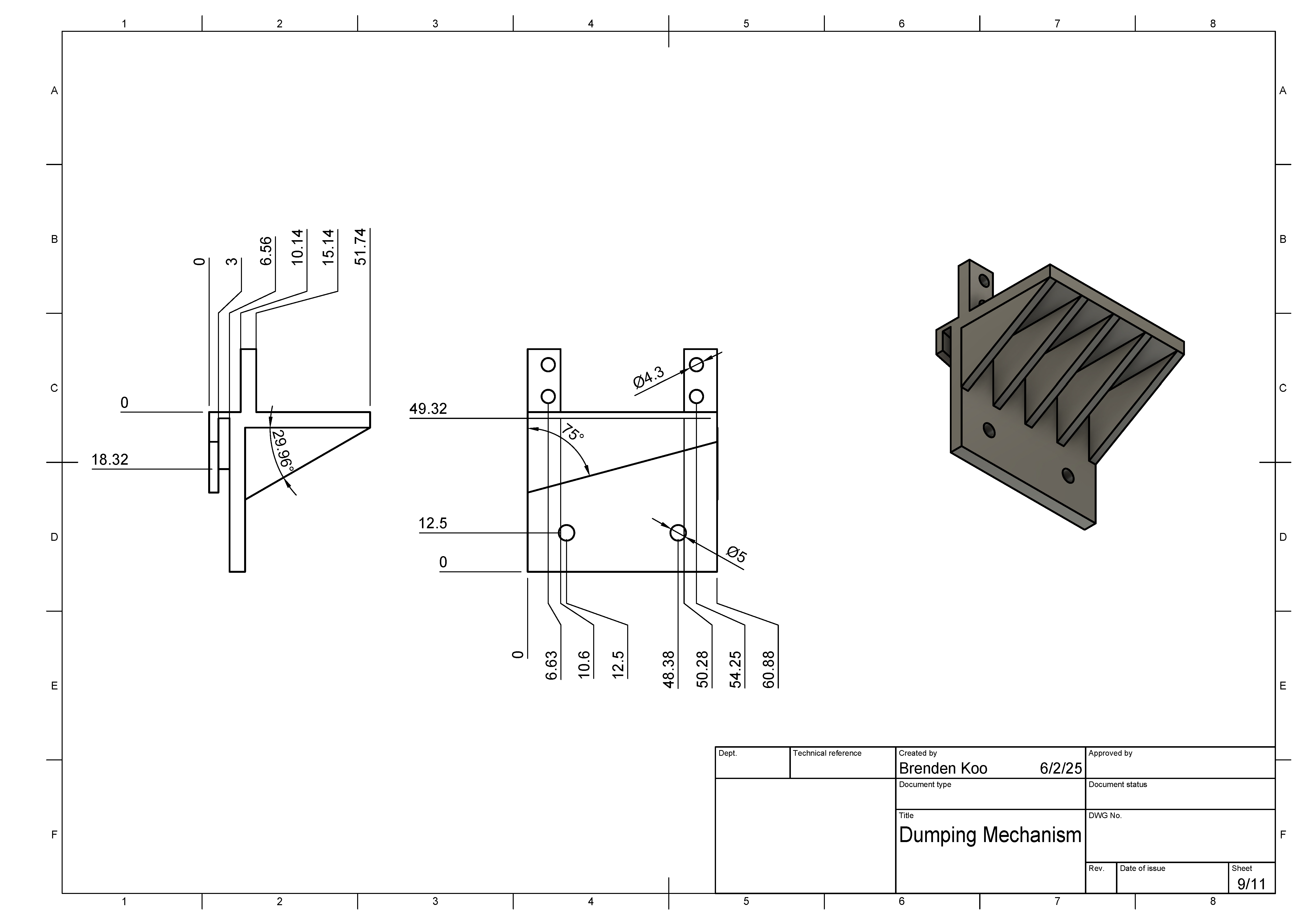

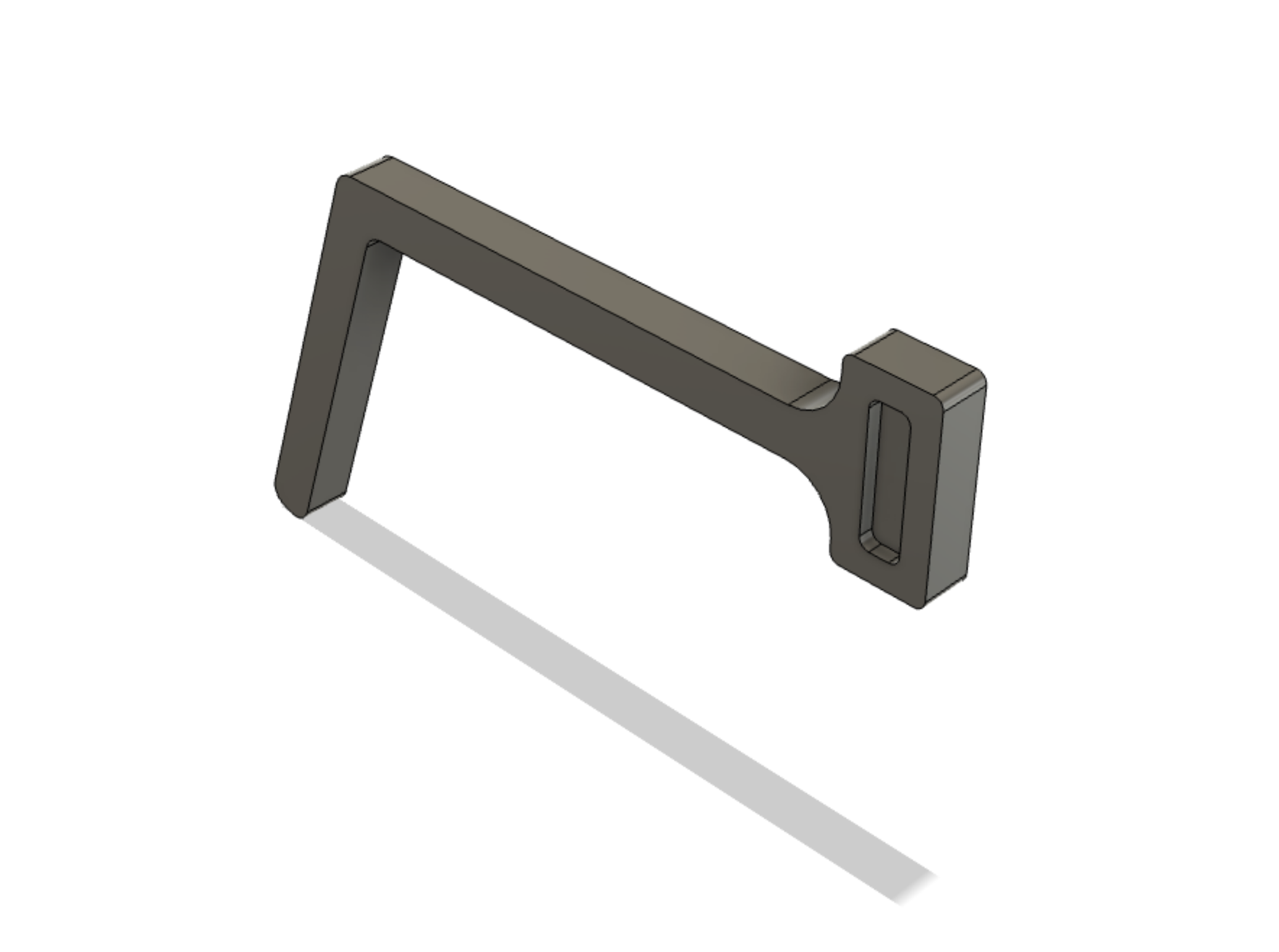
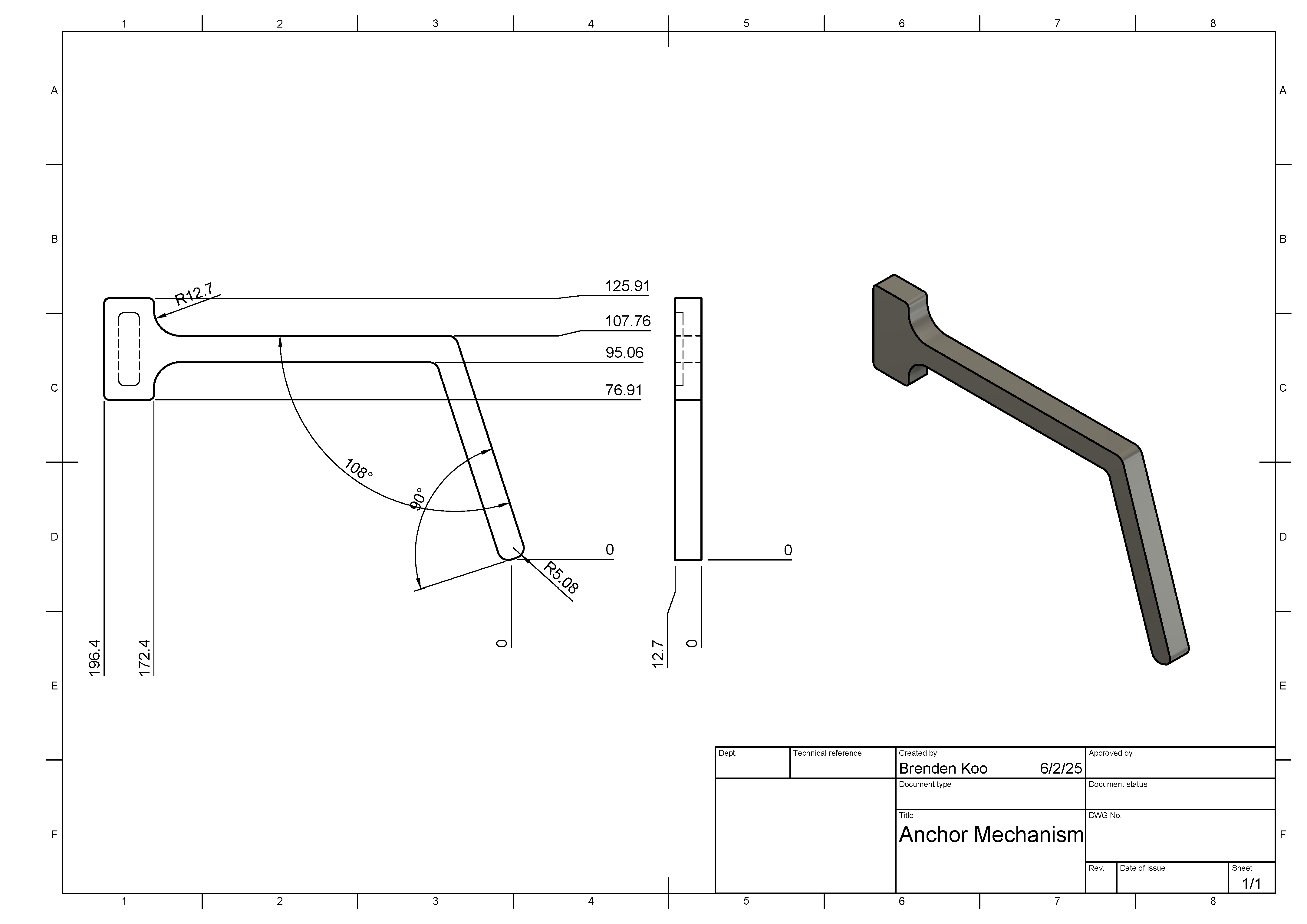
Lastly, the 3D-printed anchor proved to be useful for latching onto the RECEPTACOAL while dumping COAL. Momentum as well as passive waves both tend to drive the BARNACOAL backwards in the water, away from the RECEPTACOAL, while dispensing COAL. The servo was also activated by an HS-322HD motor.
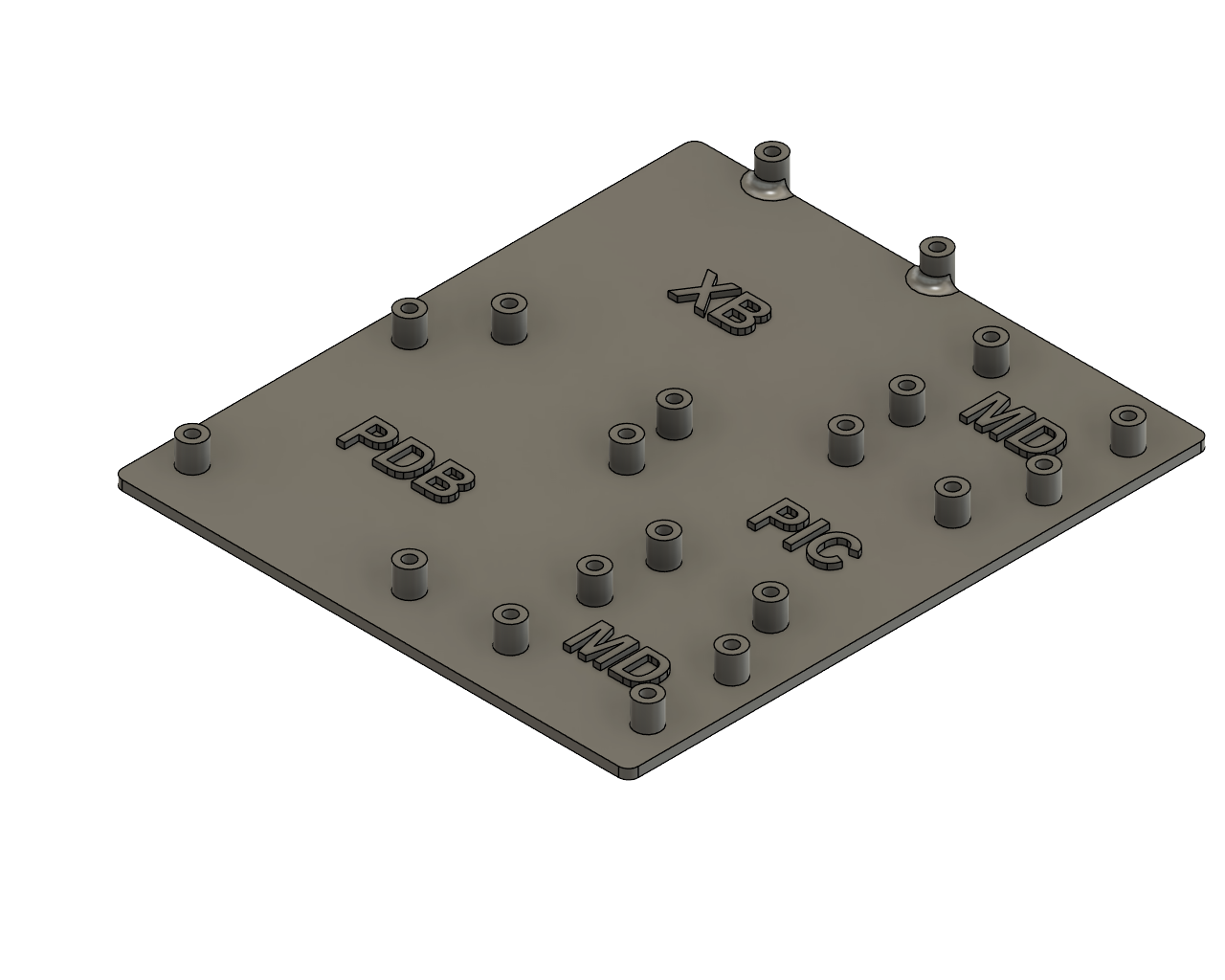
As for the onboard components, we mounted a watertight food container upside down near the nearside of the boat. Inside the tupperware, the battery pack sits on the bottom and the PCB mount rests on top of the battery packs. This design was simple but ensured that 1) none of the critical electronics were exposed to water and 2) in the midst of all the jostling and motion in water, the PCBs would not come into contact with each other and cause any unintentional shorts.
In order to reduce battery interference and to best organize the electrical components of the robot, we 3-D printed holders to house the 12V batteries as well as the portable battery that was connected to the power distribution board.

We cut through-holes in the tupperware, the Duron base plate, and the foam to allow motor wires to pass through. On top of the tupperware, a servo motor with a large “2” is attached, and the “2” is upside-down by default. When the BARNACOAL has successfully paired to another SPECTACOAL, the “2” rotates right side up.

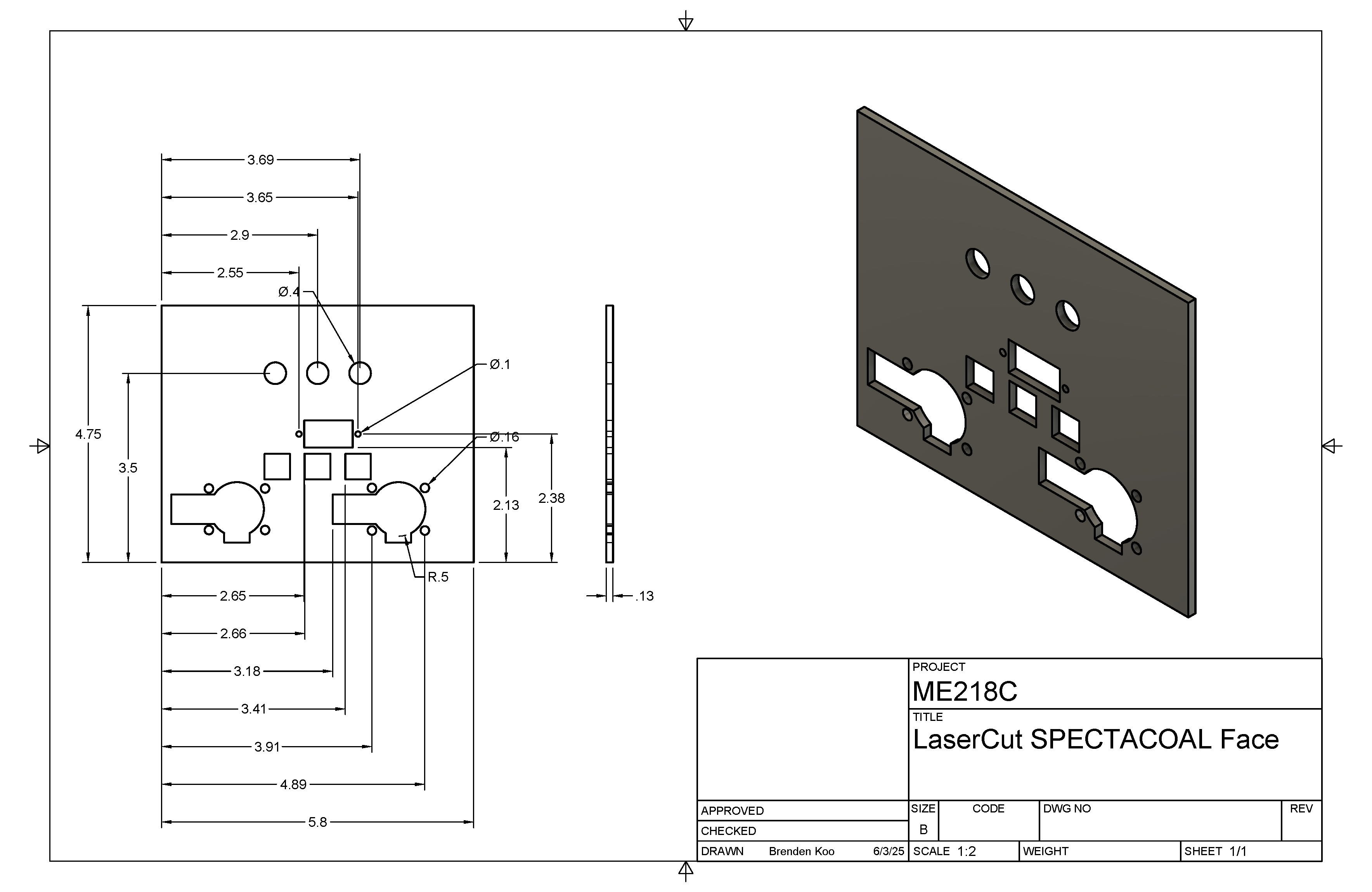
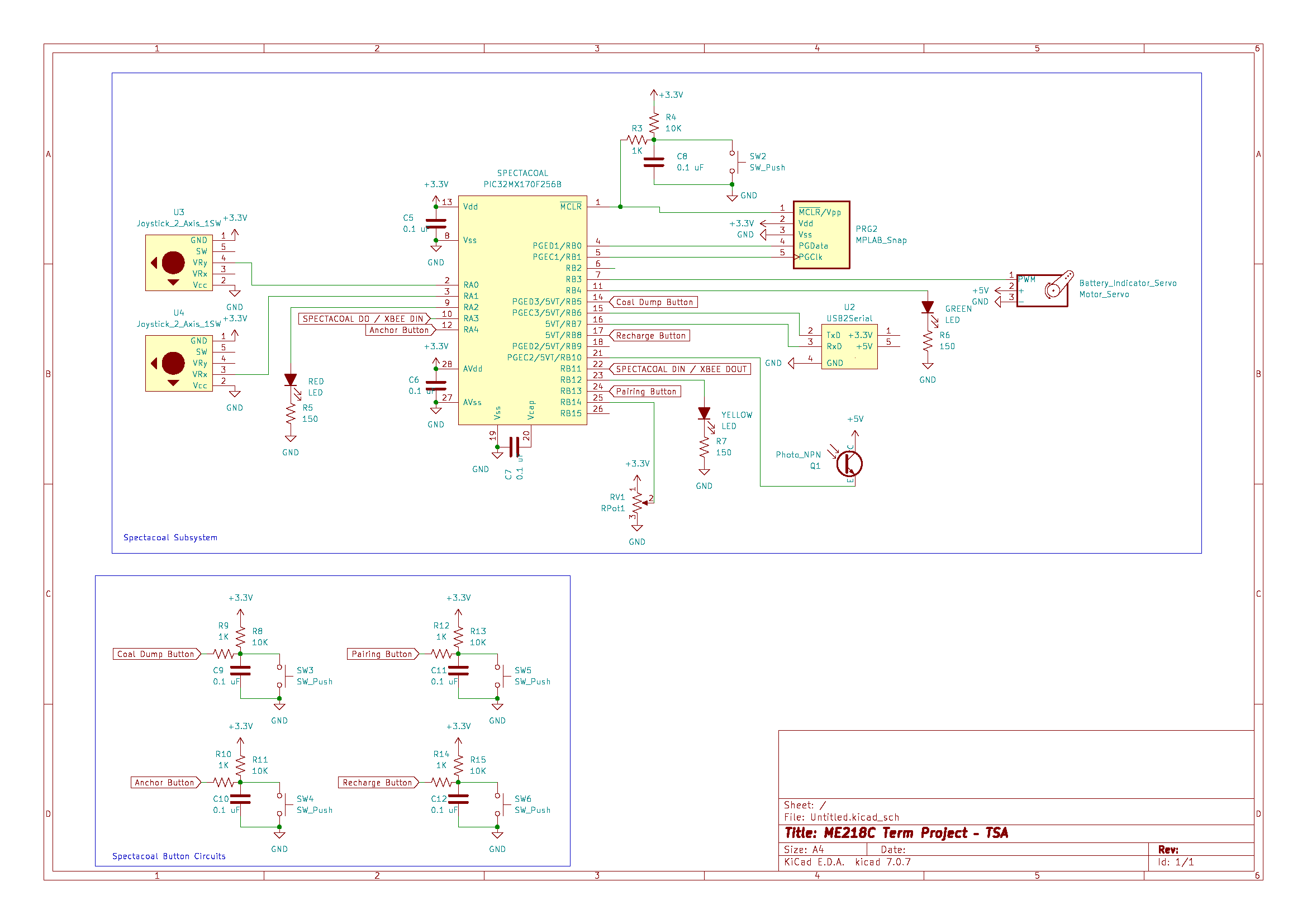
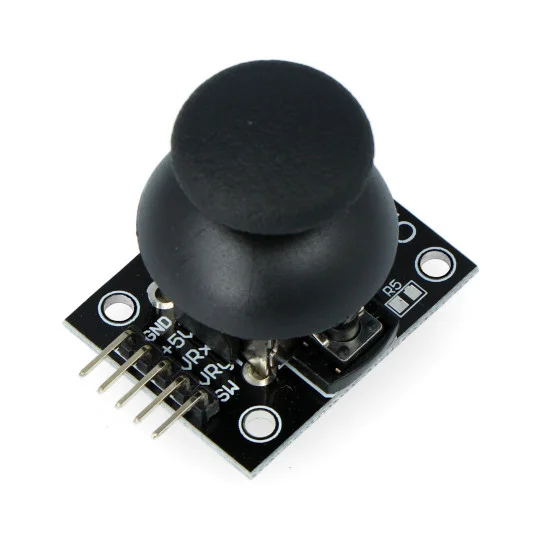
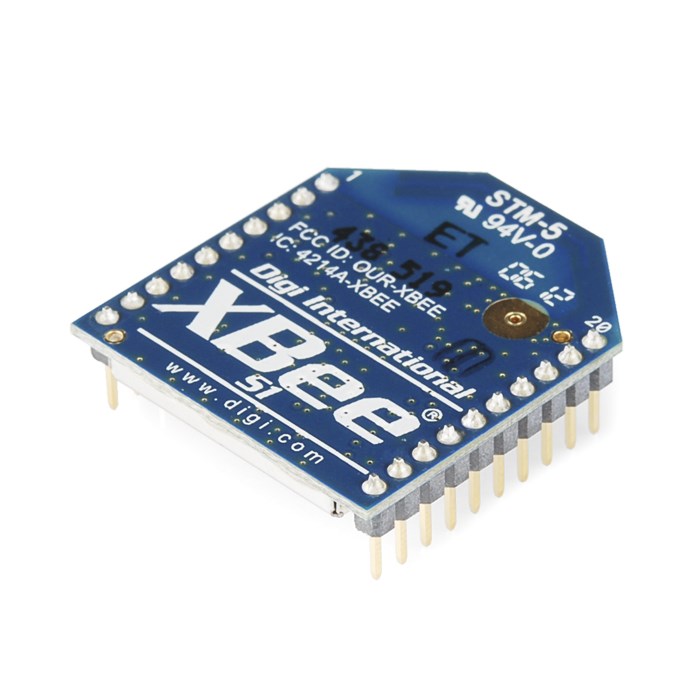
The main housing of the SPECTACOAL was created using 3D-printed parts and a laser-cut acrylic front panel to house the 3 buttons, 2 joysticks, and 3 state-indicator LEDs of varying colors. Following the overarching airplane theme, the SPECTACOAL resembles a suitcase inside a TSA tray-box and houses an XBee module and a PIC32 chip. As it is not coming into intentional contact with the water, the SPECTACOAL’s main requirement was to provide easy access to the various tactile BARNACOAL controllers (joysticks, buttons, potentiometer, etc.) and withstand the motions of an occasional human celebration.


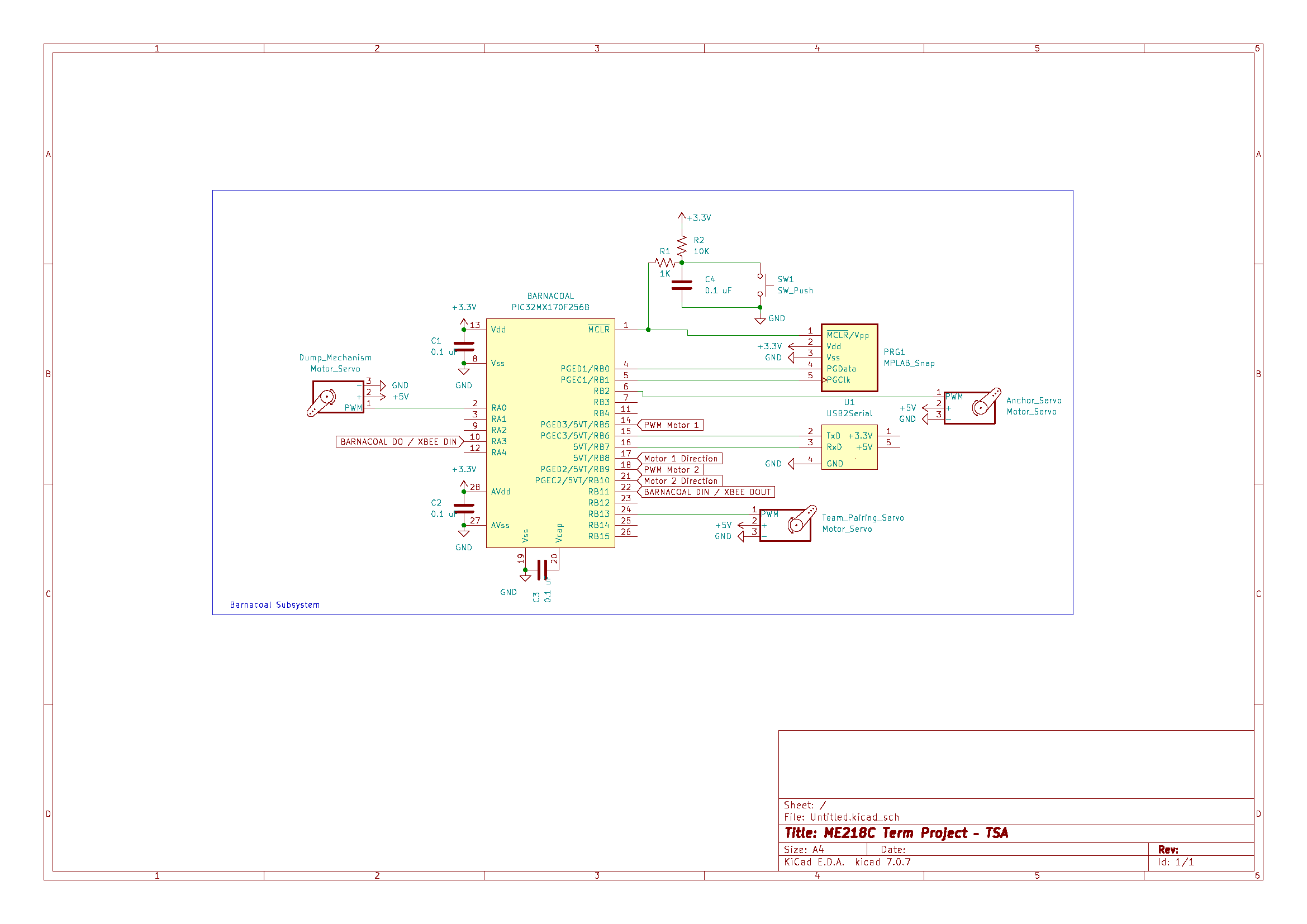
The KiCAD Schematic of the entire electrical system is as follows. Note that the electrical design of this project is divided into two subsystems–the BARNACOAL (the watercraft) and the SPECTACOAL (the controller). The BARNACOAL is connected to most of the servos and motors, whereas the SPECTACOAL is mainly connected to indicators and buttons to control an action and provide feedback on the completion of the action. Each of the subsystems is comprised of a PIC32 microcontroller wired up to various different components, listed below.
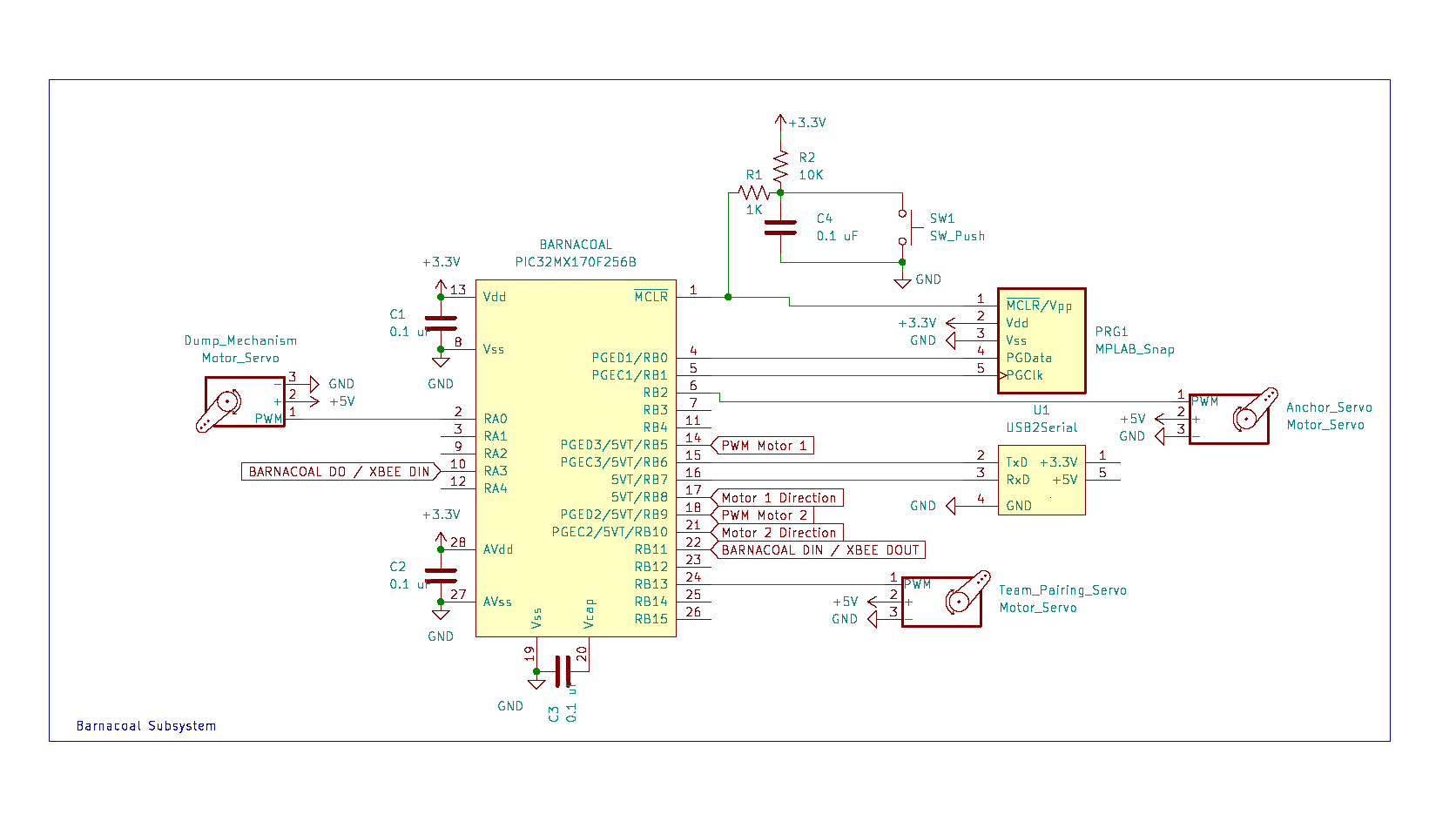
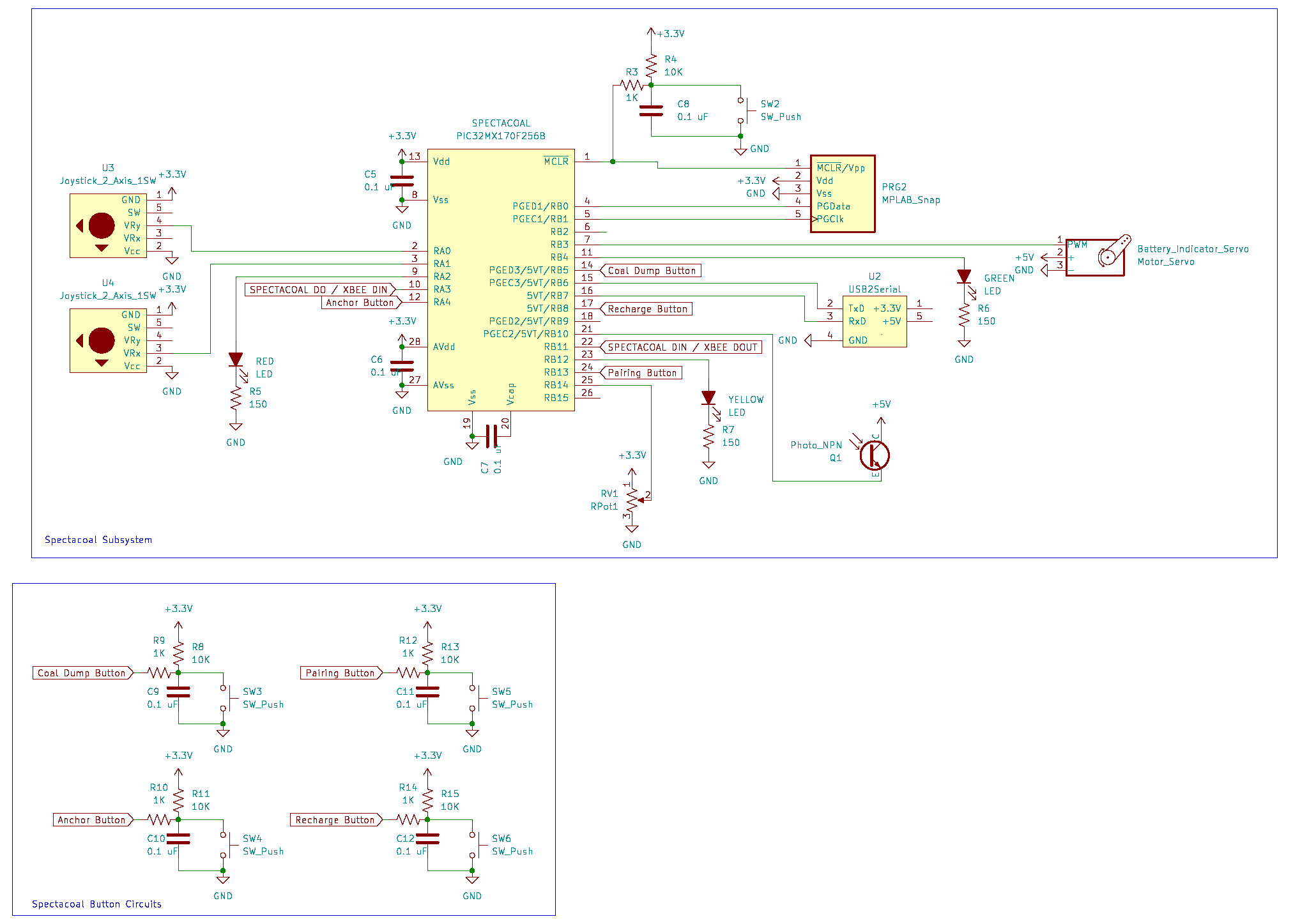
This subsystem is in charge of sending commands from the SPECTACOAL to the BARNACOAL via the XBee radio module and the class-wide communications protocol. Considering that the BARNACOAL is not entirely autonomous, the SPECTACOAL is able to send constant messages to focus on the control-aspect of the tasks accomplished by the BARNACOAL.





The BARNACOAL is the watercraft itself, and the electronics on the BARNACOAL is primarily action-focused. Any components in this subsystem are geared towards driving the motor propellers, or driving the servo motors for the anchor or the dump mechanism. Any action that the BARNACOAL completes is as a result of a command provided by the SPECTACOAL, and the BARNACOAL sends the SPECTACOAL a pairing indicator message or a battery level message as a confirmation that the two devices are successfully paired. Most of the communication between the devices occurs via the XBee radio module.



The software is designed to be consistent with the class-wide Communication Protocol, designed by the Communications Committee, comprised of one delegate of each team. Check out the document below:
2025 ME218C Communications ProtocolThe software for both the BARNACOAL and SPECTACOAL are each written in the format of a state machine that flows between a waiting state and a paired state. The state diagram for the BARNACOAL is a bit simpler than that of the SPECTACOAL. The SPECTACOAL involves additional states as it waits for the BARNACOAL to pair and additionally has a separate state when recharging.
The way that the software works for both the SPECTACOAL and BARNACOAL is that they both configure the UART2 Module to transmit and receive data via interrupts. However, the data can only be transmitted or received when the two devices are in a pairing or paired state–when in an unpaired state, the two devices should not be sending messages to one another.
Furthermore, the way that the message transmission works is that the messages are constructed via a helper function, according to the API framework. The way that message reception works is that the messages are stored in the Receive buffer and evaluated to ensure that the messages are properly packaged (with the start delimiter, the proper address, the frame ID, message length, and the checksum) then the data is parsed and the corresponding commands are carried out.
Click below to view pseudocode, source code, and header files.
bool InitSPECXBeeService(uint8_t Priority)
{
ES_Event_t ThisEvent;
MyPriority = Priority;
// post the initial transition event
// Configure the pins
//First Byte, since there is nothing set to false
DelimiterFound = false;
// avoid any issues in the ISR regarding buffer size
/* Set up UART2 Module */
// Enable Interrupts and Configure Interrupts to transmit and receive
// Enable input capture and global interrupts;
ThisEvent.EventType = ES_INIT;
if (ES_PostToService(MyPriority, ThisEvent) == true)
{
return true;
}
else
{
return false;
}
}
ES_Event_t RunSPECXBeeService(ES_Event_t ThisEvent)
{
ES_Event_t ReturnEvent;
ReturnEvent.EventType = ES_NO_EVENT; // assume no errors
if (ThisEvent.EventType == ES_INIT) {
// Start the timer for 200 ms first so we stay on 5Hz schedule
ES_Timer_InitTimer (MESSAGE_TIMER, 200);
}
else if (ThisEvent.EventType == ES_PAIRING_REQ) {
// Basically the mumbo jumbo to pair with the boats
// Update the address to transmit data to based on the boat address
}
else if (ThisEvent.EventType == ES_TIMEOUT) {
// if the Message Timer timed out, then check if it is paired with the right barnacoal
// if paired, then make the packet of data to send
}
// Also need to handle issue with recharging
else if (ThisEvent.EventType == ES_RECHARGE ) {
//
}
return ReturnEvent;
}
// Helper function to also package data into transmit buffer
void __ISR(_UART_2_VECTOR,IPL7SOFT)UART2_ISR(void) {
__builtin_disable_interrupts();
// Handle the Rx Buffer first !
if (If the Receive Interrupt Flag is set) {
Write the Receive register into received;
Post a new event with the receive messages;
Clear the Receive Interrupt Flag;
// Do more with understanding if the bytes are correct
// Check the start delimiter and all the bytes to follow
// Index through the receive buffer and make sure the data is valid
}
// handle the Tx buffer now
else if (If Transmit Interrupts are enabled and the transmit interrupt flag is set) {
// do some fancy stuff with the interrupt handling to make sure the
// data is transmitted over nicely
// Make sure not to clear the transmit interrupt enable mask until
// the entire message is transmitted over
Clear Transmit Interrupt Flag;
}
__builtin_enable_interrupts();
}
/****************************************************************************
Module
SPECXBeeService.c
Revision
1.0.1
Description
This is a template file for implementing a simple service under the
Gen2 Events and Services Framework.
Notes
History
When Who What/Why
-------------- --- --------
01/16/12 09:58 jec began conversion from TemplateFSM.c
****************************************************************************/
/*----------------------------- Include Files -----------------------------*/
/* include header files for this state machine as well as any machines at the
next lower level in the hierarchy that are sub-machines to this machine
*/
#include "ES_Configure.h"
#include "ES_Framework.h"
#include "SPECXBeeService.h"
#include <sys/attribs.h>
#include "ADPotService.h"
#include "dbprintf.h"
#include <xc.h>
#include "PWM_PIC32.h"
/*----------------------------- Module Defines ----------------------------*/
#define MAX_MESSAGE_SIZE 4
#define MAX_TX_BUF_SIZE MAX_MESSAGE_SIZE + 9
#define MAX_RX_BUF_SIZE MAX_MESSAGE_SIZE + 5
/*---------------------------- Module Functions ---------------------------*/
/* prototypes for private functions for this service.They should be functions
relevant to the behavior of this service
*/
/*---------------------------- Module Variables ---------------------------*/
// with the introduction of Gen2, we need a module level Priority variable
static uint8_t MyPriority;
static TemplateState_t CurrentState;
// buffers for Tx and Rx data
static uint8_t TX_BUF[13];
volatile static uint8_t RX_BUF[9];
// Tx and Rx ISR index counters to make sure the bytes being sent/received are correct
volatile static uint8_t idx_TX;
volatile static uint8_t idx_RX;
// Size that a current Tx / Rx will be
static uint8_t TxBufferSize = 13;
volatile static uint8_t RxBufferSize;
// Checksums sum of bytes in a Tx Message
static uint8_t TxByteSum;
volatile static uint8_t RxByteSum;
// Frame ID
static uint8_t FrameID = 0x00;
// Boolean to track transmission of start delimiter
volatile static bool DelimiterFound;
// Union for access of bytes within the addresses
typedef union {
uint16_t Whole16;
uint8_t Byte[2];
}TwoBytes_t;
static TwoBytes_t TxAddress;
static TwoBytes_t RxAddress;
static TwoBytes_t RxMessage;
// Boat Addresses
static uint16_t ADDRESSES[6] = {0x2081, 0x2082, 0x2083, 0x2084, 0x2095, 0x2086};
// Variables determined by Comms Committee
// Joystick 1
static uint32_t FORWARD = 0;
// Joystick 2
static uint32_t TURN = 0;
static uint8_t STATUS = 0;
static uint8_t Buttons = 0;
static uint8_t Charge = 0;
bool IsAnchor = false;
bool IsDump = false;
uint32_t potValue = 0;
uint32_t adjPotValue = 0;
uint32_t JoystickX = 0;
uint32_t JoystickY = 0;
static uint8_t onesCount = 0;
static uint8_t zerosCount = 0;
static uint8_t readCount = 0;
/*------------------------------ Module Code ------------------------------*/
/****************************************************************************
Function
InitSPECXBeeService
Parameters
uint8_t : the priorty of this service
Returns
bool, false if error in initialization, true otherwise
Description
Saves away the priority, and does any
other required initialization for this service
Notes
Author
J. Edward Carryer, 01/16/12, 10:00
****************************************************************************/
bool InitSPECXBeeService(uint8_t Priority)
{
ES_Event_t ThisEvent;
MyPriority = Priority;
/* Pin Configurations */
TRISBbits.TRISB11 = 1; // --> Configure pin for inputs Rx
U2RXR = 0b0011;
TRISAbits.TRISA3 = 0; //--> Configure pin for outputs Tx
RPA3R = 0b0010;
TRISAbits.TRISA0 = 1; //--> Configure pin for input for joystick
ANSELAbits.ANSA0 = 1; // Analog
TRISAbits.TRISA1 = 1; //--> Configure pin for input for joystick
ANSELAbits.ANSA1 = 1; // Analog
TRISBbits.TRISB14 = 1; //--> Configure pin for input for potentiometer
ANSELBbits.ANSB14 = 1; // Analog
TRISBbits.TRISB13 = 1; //--> Configure pin for input for potentiometer button
ANSELBbits.ANSB13 = 0; // Digital
TRISBbits.TRISB8 = 1; //--> Configure pin for input for Recharge mode button
TRISAbits.TRISA0 = 1; //--> Configure pin for input for joystick
ANSELAbits.ANSA0 = 1; // Analog
TRISAbits.TRISA1 = 1; //--> Configure pin for input for joystick
ANSELAbits.ANSA1 = 1; // Analog
TRISAbits.TRISA4 = 1; //--> Configure pin for input for anchor button
TRISBbits.TRISB5 = 1; //--> Configure pin for input for dump button
TRISBbits.TRISB3 = 0; //--> Configure pin for output for battery indicator servo
TRISBbits.TRISB12 = 0; //--> Configure pin for output for pairing mode indicator // RED LED
TRISBbits.TRISB4 = 0; //--> Configure pin for output for drive mode indicator // GREEN LED
TRISAbits.TRISA2 = 0; //--> Configure pin for output for recharge mode indicator // YELLOW LED
ANSELBbits.ANSB12 = 0;
LATBbits.LATB12 = 0;
LATBbits.LATB4 = 0;
LATAbits.LATA2 = 1;
TRISBbits.TRISB10 = 1; //--> Configure pin for input for barcode scanner
PWMSetup_BasicConfig(1);
PWMSetup_AssignChannelToTimer(1, _Timer2_ );
PWMSetup_SetPeriodOnTimer(50000, _Timer2_);
PWMSetup_MapChannelToOutputPin(1, PWM_RPB3);
PWMOperate_SetPulseWidthOnChannel(5000, 1);
//Find the Address of the Boat that you want to send to
// TxAddress.Whole = ADDRESSES[GET BOAT ID];
//First Byte, since there is nothing set to false
DelimiterFound = false;
// avoid any issues in the ISR regarding buffer size
RxBufferSize = MAX_RX_BUF_SIZE;
// Hard code address
TxAddress.Whole16 = (0x20 << 8) | 0x82;
/* Set up UART2 Module */
// Disable UART2
U2MODEbits.ON = 0;
// Configure the UXMODE register to clear the SIDL, IREN, RTSMD,
// UEN, WAKE, LPBACK, ABAUD, RXINV
U2MODEbits.SIDL = 0;
U2MODEbits.IREN = 0;
U2MODEbits.RTSMD = 1;
U2MODEbits.WAKE = 0;
U2MODEbits.LPBACK = 0;
U2MODEbits.ABAUD = 0;
U2MODEbits.UEN = 0b00;
U2MODEbits.RXINV = 0;
// Configure the UXMODE register to choose high speed or low speed baud clock
U2MODEbits.BRGH = 0;
// Configure the UXMODE register to choose the number of data bits, stop bits, and parity
// 8 bit data, no parity
U2MODEbits.PDSEL = 0b00;
// one stop bit
U2MODEbits.STSEL = 0;
// Configure the UXSTA register to clear the UXINTV, UTXBRK and ADDEN bits
U2STAbits.UTXINV = 0;
U2STAbits.UTXBRK = 0;
U2STAbits.ADDEN = 0;
U2STAbits.ADM_EN = 0;
U2STAbits.URXISEL = 0b00;
U2STAbits.UTXISEL = 0b00;
// Enable the receiver
U2STAbits.URXEN = 1;
// Enable the transmitter
U2STAbits.UTXEN = 1;
// Baud Rate of 9600
U2BRG = 129;
U2TXREG;
U2RXREG;
IFS1CLR = _IFS1_U2RXIF_MASK;
IFS1CLR = _IFS1_U2TXIF_MASK;
IEC1bits.U2RXIE = 1; // Enable UART2 RX interrupt
IEC1bits.U2TXIE = 1;
IPC9bits.U2IP = 7; // Set priority
U2MODEbits.ON = 1;
// Enable input capture and global interrupts;
__builtin_enable_interrupts();
CurrentState = InitPState;
ThisEvent.EventType = ES_INIT;
if (ES_PostToService(MyPriority, ThisEvent) == true)
{
return true;
}
else
{
return false;
}
}
/****************************************************************************
Function
PostSPECXBeeService
Parameters
EF_Event_t ThisEvent ,the event to post to the queue
Returns
bool false if the Enqueue operation failed, true otherwise
Description
Posts an event to this state machine's queue
Notes
Author
J. Edward Carryer, 10/23/11, 19:25
****************************************************************************/
bool PostSPECXBeeService(ES_Event_t ThisEvent)
{
return ES_PostToService(MyPriority, ThisEvent);
}
/****************************************************************************
Function
RunSPECXBeeService
Parameters
ES_Event_t : the event to process
Returns
ES_Event, ES_NO_EVENT if no error ES_ERROR otherwise
Description
add your description here
Notes
Author
J. Edward Carryer, 01/15/12, 15:23
****************************************************************************/
ES_Event_t RunSPECXBeeService(ES_Event_t ThisEvent)
{
ES_Event_t ReturnEvent;
ReturnEvent.EventType = ES_NO_EVENT; // assume no errors
switch (CurrentState)
{
case InitPState: // Unpaired
{
if (ThisEvent.EventType == ES_INIT) {
DB_printf("IN INIT STATE \n");
LATBbits.LATB4 = 0;
LATBbits.LATB12 = 1;
LATAbits.LATA2 = 0;
// Start the timer here once when pairing begins
ES_Timer_InitTimer(POT_TIMER, 50);
}
else if (ThisEvent.EventType == ES_TIMEOUT) {
// Read the potentiometer value and then print to Tera Term for debugging
potValue = readADC();
adjPotValue = (potValue * 100.0 / 1023);
ES_Timer_InitTimer(POT_TIMER, 50);
DB_printf("READING POT VALUE, %d \n", adjPotValue);
}
else if (ThisEvent.EventType == ES_POT_BUTTON) {
// math to find which boat to pair with :)
if (adjPotValue < 17) {
TxAddress.Whole16 = (0x20 << 8) | 0x81;
}
else if (adjPotValue < 34) {
TxAddress.Whole16 = (0x20 << 8) | 0x82;
}
else if (adjPotValue < 51) {
TxAddress.Whole16 = (0x20 << 8) | 0x83;
}
else if (adjPotValue < 68) {
TxAddress.Whole16 = (0x20 << 8) | 0x84;
}
else if (adjPotValue < 85) {
TxAddress.Whole16 = (0x20 << 8) | 0x85;
}
else {
TxAddress.Whole16 = (0x20 << 8) | 0x86;
}
DB_printf("NO LONGER READING POT VALUE, address 0x%x\n", TxAddress.Whole16);
CurrentState = Pairing;
ES_Timer_InitTimer(MESSAGE_TIMER, 200);
}
}
break;
case Pairing:
{
DB_printf("STATE: PAIRING\n");
if (ThisEvent.EventType == ES_TIMEOUT) {
// if the Message Timer timed out, then check if it is paired with the right barnacoal
STATUS = 2;
ConstructTx(STATUS);
idx_TX = 0;
IFS1SET = _IFS1_U2TXIF_MASK;
IEC1SET = _IEC1_U2TXIE_MASK;
// DB_printf("Sent API frame to boat at address 0x%x\n", TxAddress.Whole16);
ES_Timer_InitTimer(MESSAGE_TIMER, 200);
}
else if (ThisEvent.EventType == ES_RX_SUCCESS) {
// Receive buffer but not the first three bytes, so its 8-3
if (RX_BUF[5] == 0xFF) {
DB_printf("Pairing Success!\n");
CurrentState = Paired;
LATAbits.LATA2 = 0;
LATBbits.LATB4 = 1;
// Servo shit yurrrrrr motor go burrrrrrrr
}
}
}
break;
case Paired:
{
DB_printf("STATE: PAIRED\n");
LATBbits.LATB4 = 1;
LATBbits.LATB12 = 0;
LATAbits.LATA2 = 0;
// DB_printf("This is the amount of recharge left %u\n", Charge);
STATUS = 0;
if (ThisEvent.EventType == ES_TIMEOUT) {
if (ThisEvent.EventParam == MESSAGE_TIMER) {
// if the Message Timer timed out, then check if it is paired with the right barnacoal
if (Charge > 0) {
JoystickX = GetJoystickXValue();
JoystickY = GetJoystickYValue();
uint32_t AdjJoystickX = (uint32_t)((JoystickX * 255.0) / 1023.0 + 0.5);
uint32_t AdjJoystickY = (uint32_t)((JoystickY * 255.0) / 1023.0 + 0.5);
TURN = 255 - AdjJoystickX;
FORWARD = AdjJoystickY;
DB_printf("This is TURN %u and FORWARD %u\n", TURN, FORWARD);
// // ADDING A DEAD BAND ON THE SPECTACOAL
if ((AdjJoystickX >= 117.0) && (AdjJoystickX <= 137.0)) {
TURN = 127;
}
if ((AdjJoystickY >= 117.0) && (AdjJoystickY <= 137.0)) {
FORWARD = 127;
}
}
else {
TURN = 127;
FORWARD = 127;
}
ConstructTx(STATUS);
if (IsAnchor == true || IsDump == true) {
Buttons = 0;
IsAnchor = false;
IsDump = false;
}
idx_TX = 0;
IFS1SET = _IFS1_U2TXIF_MASK;
IEC1SET = _IEC1_U2TXIE_MASK;
// DB_printf("Sent API frame to boat at address 0x%x\n", TxAddress.Whole16);
ES_Timer_InitTimer(MESSAGE_TIMER, 200);
}
else if (ThisEvent.EventParam == TIMEOUT_TIMER) {
CurrentState = InitPState;
LATBbits.LATB4 = 0;
LATBbits.LATB12 = 1;
LATAbits.LATA2 = 0;
PWMOperate_SetPulseWidthOnChannel(5000, 1);
}
else if (ThisEvent.EventParam == BLINK_TIMER) {
uint8_t RedLED = PORTAbits.RA2;
LATAbits.LATA2 = !RedLED;
DB_printf("THIS SHOULD BE BLINKING\n");
}
}
else if (ThisEvent.EventType == ES_RECHARGE) {
DB_printf("This is Recharge mode\n");
CurrentState = Recharge;
// Construct recharge message or change state
}
else if (ThisEvent.EventType == ES_ANCHOR) {
DB_printf("Anchor is being deployed\n");
// check if the anchor is deployed first
// bit for anchor is bit 1
Buttons ^= (1 << 1);
// toggle state of isAnchor
IsAnchor = !IsAnchor;
}
else if (ThisEvent.EventType == ES_DUMP) {
DB_printf("Dumping Coal\n");
// check if the dump mechanism is deployed first
// bit for dump mechanism is bit 0
Buttons ^= (1 << 0);
IsDump = !IsDump;
}
else if (ThisEvent.EventType == ES_RX_SUCCESS) {
// byte 9 from BARNACOAL is the charge value
Charge = RX_BUF[5];
DB_printf("This is the amount of charge left %u\n", Charge);
// Adjust the value for the LEDs to indicate charge
// Four Second Timer for Timeout
if (Charge == 0) {
LATAbits.LATA2 = 1;
ES_Timer_InitTimer(BLINK_TIMER, 2500);
}
PWMOperate_SetPulseWidthOnChannel(5000 - (Charge * 50 / 3) , 1);
ES_Timer_InitTimer(TIMEOUT_TIMER, 4000);
}
}
break;
case Recharge:
{
STATUS = 1;
LATBbits.LATB4 = 0;
LATBbits.LATB12 = 0;
LATAbits.LATA2 = 1;
if (ThisEvent.EventType == ES_TIMEOUT) {
if (ThisEvent.EventParam == MESSAGE_TIMER) {
// if the Message Timer timed out, then check if it is paired with the right barnacoal
ConstructTx(STATUS);
idx_TX = 0;
IFS1SET = _IFS1_U2TXIF_MASK;
IEC1SET = _IEC1_U2TXIE_MASK;
// DB_printf("Sent API frame to boat at address 0x%x\n", TxAddress.Whole16);
ES_Timer_InitTimer(MESSAGE_TIMER, 200);
}
}
else if (ThisEvent.EventType == ES_DRIVE) {
DB_printf("Exiting Recharge Mode\n");
CurrentState = Paired;
ES_Timer_InitTimer(MESSAGE_TIMER, 200);
}
else if (ThisEvent.EventType == ES_RX_SUCCESS) {
// byte 9 from BARNACOAL is the charge value
Charge = RX_BUF[5];
DB_printf("STATE: RECHARGE %u \n", Charge);
// PWMOperate_SetDutyOnChannel((5 + (Charge / 20)) , 1);
PWMOperate_SetPulseWidthOnChannel(5000 - (Charge * 50 / 3) , 1);
}
}
break;
}
return ReturnEvent;
}
/****************************************************************************
Function
QuerySPECXBeeService
Parameters
None
Returns
TemplateState_t The current state of the Template state machine
Description
returns the current state of the Template state machine
Notes
Author
J. Edward Carryer, 10/23/11, 19:21
****************************************************************************/
TemplateState_t QuerySPECXBeeService(void)
{
return CurrentState;
}
/***************************************************************************
private functions
***************************************************************************/
bool ConstructTx (uint8_t status) {
__builtin_disable_interrupts();
bool returnVal = true;
TX_BUF[0] = 0x7E; // Start Delimiter
TX_BUF[1] = 0x00; // Length MSB
TX_BUF[2] = 0x09; // Length LSB
TX_BUF[3] = 0x01; // API identifier
TX_BUF[4] = FrameID;
TX_BUF[5] = TxAddress.Byte[1]; // Address MSB
TX_BUF[6] = TxAddress.Byte[0]; // Address LSB
TX_BUF[7] = 0x01; // Disable ACK
TX_BUF[8] = status;
// handle pairing state
if (status == 0x02) {
TX_BUF[9] = 0x00;
TX_BUF[10] = 0x00;
TX_BUF[11] = 0x00;
}
// handle driving state
else if (status == 0x00) {
TX_BUF[9] = FORWARD;
TX_BUF[10] = TURN;
TX_BUF[11] = Buttons; // This is for the button pressing, need to do logical operations
}
// handle Recharge state
else if (status == 0x01) {
TX_BUF[9] = 0x00;
TX_BUF[10] = 0x00;
TX_BUF[11] = 0x00;
}
else {
// mishandling of data
returnVal = false;
}
TxByteSum = 0;
// add all the values together for checksum math
for (int idx = 3; idx < TxBufferSize - 1; idx++) {
TxByteSum += TX_BUF[idx];
}
TX_BUF[TxBufferSize - 1] = 0xFF - TxByteSum;
__builtin_enable_interrupts();
return returnVal;
}
void __ISR(_UART_2_VECTOR,IPL7SOFT)UART2_ISR(void) {
__builtin_disable_interrupts();
// Handle the Rx Buffer first !
if (IFS1bits.U2RXIF) {
uint8_t Received = U2RXREG;
IFS1CLR = _IFS1_U2RXIF_MASK;
if (!DelimiterFound && Received == 0x7E) {
DelimiterFound = true;
idx_RX = 0;
RxByteSum = 0;
}
if (DelimiterFound) {
if (idx_RX == 0) {
// This is the start delimiter, just need to make sure it is 0x7E
}
else if (idx_RX == 1) {
RxMessage.Byte[1] = Received;
}
else if (idx_RX == 2) {
RxMessage.Byte[0] = Received;
// Make sure that the length of the message is 5 bytes
if (RxMessage.Whole16 == 0 || RxMessage.Whole16 > MAX_RX_BUF_SIZE) {
DelimiterFound = false;
idx_RX = 0;
RxByteSum = 0;
}
else {
RxBufferSize = RxMessage.Whole16;
}
}
// This is the message now, so add to the Rx Byte Sum for checksum
else if (idx_RX < (RxBufferSize + 3)) {
RX_BUF[idx_RX - 3] = Received;
RxByteSum += Received;
}
else {
uint8_t ChecksumVal = RxByteSum + Received;
if (ChecksumVal == 0xFF) {
ES_Event_t RX_EVENT;
RX_EVENT.EventType = ES_RX_SUCCESS;
RX_EVENT.EventParam = RX_BUF[0];
PostSPECXBeeService(RX_EVENT);
}
DelimiterFound = false;
idx_RX = 0;
RxByteSum = 0;
}
idx_RX ++;
}
}
// handle the Tx buffer now
else if (IFS1bits.U2TXIF && IEC1bits.U2TXIE) {
U2TXREG = TX_BUF[idx_TX]; // Send next byte
// Done sending
idx_TX ++;
IFS1CLR = _IFS1_U2TXIF_MASK; // Clear TX interrupt flag
if (TxBufferSize == idx_TX) {
IEC1CLR = _IEC1_U2TXIE_MASK;
}
}
__builtin_enable_interrupts();
}
/*------------------------------- Footnotes -------------------------------*/
/*------------------------------ End of file ------------------------------*/
#ifndef DriveService2_H
#define DriveService2_H
#include <stdint.h>
#include <stdbool.h>
#include "ES_Events.h"
#include "ES_Port.h" // needed for definition of REENTRANT
// Public Function Prototypes
typedef enum {
WaitingForCommand,
AligningWithBeacon,
MovingToNode,
MovingForwardTimed,
TurningLeft,
TurningRight,
TurningFull,
LookingForBlock,
DroppingBlock,
TurningLeftBeacon,
TimedReverse
} DriveServiceState_t;
bool InitDriveService2(uint8_t Priority);
bool PostDriveService2(ES_Event_t ThisEvent);
ES_Event_t RunDriveService2(ES_Event_t ThisEvent);
#endif /* ServTemplate_H */bool Check4PairButton (void) {
// Rising Edge Detection
if the button is being pressed and it was not previously being pressed {
Post an event to indicate that the SPECTACOAL should pair with BARNACOAL;
PreviousState = CurrentState;
return true;
}
PreviousState = CurrentState;
return false;
}
bool Check4RechargeButton (void) {
if the Recharge button is being pressed and a rising edge is detected {
// Reading the difference between tape and not tape
if the IR sensor is reading a change in signal in the barcode {
Post an event to indicate that the recharge requirement is being met;
RechargePosted = true;
}
} else if the falling edge is detected {
Post an event to return the BARNACOAL back to drive mode;
Reset the onesCount, zerosCount, and readCount;
RechargePosted = false;
}
PreviousButtonState = CurrentButtonState;
return false;
}
bool Check4AnchorButton (void) {
If the button is being pressed and it was not previously being pressed {
if it has not been milliseconds after the previous rising edge {
LastStableState = CurrentState;
Post an event to indicate the anchor should be deployed;
PreviousState = CurrentState;
return true;
}
}
PreviousState = CurrentState;
return false;
}
bool Check4DumpButton (void) {
// Implement Debouncer
uint32_t Now = ES_Get_Time();
If the button is being pressed and it was not previously being pressed {
if it has not been milliseconds after the previous rising edge {
LastStableState = CurrentState;
Post an event to indicate the dump mechanism should be deployed;
PreviousState = CurrentState;
return true;
}
}
PreviousState = CurrentState;
return false;
}
/****************************************************************************
Module
EventCheckers.c
Revision
1.0.1
Description
This is the sample for writing event checkers along with the event
checkers used in the basic framework test harness.
Notes
Note the use of static variables in sample event checker to detect
ONLY transitions.
History
When Who What/Why
-------------- --- --------
08/06/13 13:36 jec initial version
****************************************************************************/
// this will pull in the symbolic definitions for events, which we will want
// to post in response to detecting events
#include "ES_Configure.h"
// This gets us the prototype for ES_PostAll
#include "ES_Framework.h"
// this will get us the structure definition for events, which we will need
// in order to post events in response to detecting events
#include "ES_Events.h"
// if you want to use distribution lists then you need those function
// definitions too.
#include "ES_PostList.h"
// This include will pull in all of the headers from the service modules
// providing the prototypes for all of the post functions
#include "ES_ServiceHeaders.h"
// this test harness for the framework references the serial routines that
// are defined in ES_Port.c
#include "ES_Port.h"
// include our own prototypes to insure consistency between header &
// actual functionsdefinition
#include "EventCheckers.h"
#include "dbprintf.h"
#include "ES_Timers.h"
// This is the event checking function sample. It is not intended to be
// included in the module. It is only here as a sample to guide you in writing
// your own event checkers
#if 0
/****************************************************************************
Function
Check4Lock
Parameters
None
Returns
bool: true if a new event was detected
Description
Sample event checker grabbed from the simple lock state machine example
Notes
will not compile, sample only
Author
J. Edward Carryer, 08/06/13, 13:48
****************************************************************************/
bool Check4Lock(void)
{
static uint8_t LastPinState = 0;
uint8_t CurrentPinState;
bool ReturnVal = false;
CurrentPinState = LOCK_PIN;
// check for pin high AND different from last time
// do the check for difference first so that you don't bother with a test
// of a port/variable that is not going to matter, since it hasn't changed
if ((CurrentPinState != LastPinState) &&
(CurrentPinState == LOCK_PIN_HI)) // event detected, so post detected event
{
ES_Event ThisEvent;
ThisEvent.EventType = ES_LOCK;
ThisEvent.EventParam = 1;
// this could be any of the service post functions, ES_PostListx or
// ES_PostAll functions
ES_PostAll(ThisEvent);
ReturnVal = true;
}
LastPinState = CurrentPinState; // update the state for next time
return ReturnVal;
}
#endif
/****************************************************************************
Function
Check4Keystroke
Parameters
None
Returns
bool: true if a new key was detected & posted
Description
checks to see if a new key from the keyboard is detected and, if so,
retrieves the key and posts an ES_NewKey event to TestHarnessService0
Notes
The functions that actually check the serial hardware for characters
and retrieve them are assumed to be in ES_Port.c
Since we always retrieve the keystroke when we detect it, thus clearing the
hardware flag that indicates that a new key is ready this event checker
will only generate events on the arrival of new characters, even though we
do not internally keep track of the last keystroke that we retrieved.
Author
J. Edward Carryer, 08/06/13, 13:48
****************************************************************************/
bool Check4Keystroke(void)
{
if (IsNewKeyReady()) // new key waiting?
{
ES_Event_t ThisEvent;
ThisEvent.EventType = ES_NEW_KEY;
ThisEvent.EventParam = GetNewKey();
ES_PostAll(ThisEvent);
return true;
}
return false;
}
bool Check4PairButton(void)
{
static uint8_t PreviousState = 0;
uint8_t CurrentState = PORTBbits.RB13;
if ((CurrentState == 1) && (CurrentState != PreviousState)) {
// DB_printf("Button is being pressed\n");
// Rising edge detected
ES_Event_t NewEvent;
NewEvent.EventType = ES_POT_BUTTON;
ES_PostAll(NewEvent);
PreviousState = CurrentState; // Always update PreviousState
return true;
}
PreviousState = CurrentState; // Always update PreviousState
return false;
}
static uint8_t onesCount = 0;
static uint8_t zerosCount = 0;
static uint8_t readCount = 0;
bool Check4RechargeButton(void)
{
static uint8_t PreviousButtonState = 0;
uint8_t CurrentButtonState = PORTBbits.RB8;
static bool RechargePosted = false;
uint8_t BarcodeState = PORTBbits.RB10;
if (CurrentButtonState == 1) {
if (BarcodeState == 1) {
onesCount++;
} else {
zerosCount++;
}
if (!RechargePosted && (onesCount > 30) && (onesCount <= (zerosCount + 4))) {
DB_printf("Recharging Action\n");
ES_Event_t NewEvent;
NewEvent.EventType = ES_RECHARGE;
ES_PostAll(NewEvent);
RechargePosted = true;
}
}
// Right now the issue is that even if you're holding down the button,
// if you started the barcode scan successfully, even if you don't continue the scan it continues to recharge
else if (CurrentButtonState == 0 && PreviousButtonState == 1) {
ES_Event_t NewEvent;
NewEvent.EventType = ES_DRIVE;
ES_PostAll(NewEvent);
onesCount = 0;
zerosCount = 0;
readCount = 0;
RechargePosted = false;
}
PreviousButtonState = CurrentButtonState; // Always update PreviousState
return false;
}
bool Check4AnchorButton(void)
{
uint8_t CurrentState = PORTAbits.RA4;
// Implement Debouncer
static uint8_t LastStableState = 0;
static uint8_t LastReadState = 0;
static uint32_t LastDebounceTime = 0;
uint32_t Now = ES_Timer_GetTime();
if (CurrentState != LastReadState) {
LastDebounceTime = Now;
LastReadState = CurrentState;
}
if ((Now - LastDebounceTime) > 50) {
if (LastStableState != CurrentState) {
LastStableState = CurrentState;
// Rising edge
if (CurrentState == 1) {
ES_Event_t NewEvent;
NewEvent.EventType = ES_ANCHOR;
ES_PostAll(NewEvent);
return true;
}
}
}
return false;
}
bool Check4DumpButton(void)
{
uint8_t CurrentState = PORTBbits.RB5;
// Implement Debouncer
static uint8_t LastStableState = 0;
static uint8_t LastReadState = 0;
static uint32_t LastDebounceTime = 0;
uint32_t Now = ES_Timer_GetTime();
if (CurrentState != LastReadState) {
LastDebounceTime = Now;
LastReadState = CurrentState;
}
if ((Now - LastDebounceTime) > 50) {
if (LastStableState != CurrentState) {
LastStableState = CurrentState;
// Rising edge
if (CurrentState == 1) {
ES_Event_t NewEvent;
NewEvent.EventType = ES_DUMP;
ES_PostAll(NewEvent);
return true;
}
}
}
return false;
}#ifndef FollowerSPIService_H
#define FollowerSPIService_H
#include <stdint.h>
#include <stdbool.h>
#include "ES_Events.h"
#include "ES_Port.h" // needed for definition of REENTRANT
// Public Function Prototypes
typedef enum
{
WaitingCommand,
CompletingAction,
WaitingBeaconAlign,
} FollowerSPIState_t;
bool InitFollowerSPIService(uint8_t Priority);
bool PostFollowerSPIService(ES_Event_t ThisEvent);
ES_Event_t RunFollowerSPIService(ES_Event_t ThisEvent);
#endif /* ServTemplate_H */Based on the pins mapped to be inputs for the analog settings:
Read one input pin value for the horizontal-axis joystick -- adcResults[0]
Read one input pin value for the vertical-axis joystick -- adcResults[1]
Read one input pin value for the potentiometer -- adcResults[2]
Create a helper function for reading JoystickX
Create a helper function for reading JoystickY
Create a helper function for reading Potentiometer/****************************************************************************
Module
AD_PotService.c
Revision
1.0.1
Description
* Create a simple service (ADService) to handle the reading of the A/D and
* updating of the interval between steps. The initializer for this service
* would init the A/D system and start a timer (ADTimer) running to trigger
* speed updates. The speed updates don?t need to happen all that often. I?d
* suggest 50Hz (20ms interval) would be plenty fast enough. Before leaving
* the init function, start the timer associated with the other state machine
* (StepTimer, below). When the ADTimer expires, you would read the A/D and
* do the scaling to create the time interval to wait between steps. This A/D
* service ought to be implemented inside its own module, so you?ll also need
* an ?access function? to query the value of the scaled interval.
Notes
History
When Who What/Why
-------------- --- --------
01/16/12 09:58 jec began conversion from TemplateFSM.c
****************************************************************************/
/*----------------------------- Include Files -----------------------------*/
/* include header files for this state machine as well as any machines at the
next lower level in the hierarchy that are sub-machines to this machine
*/
#include "ES_Configure.h"
#include "ES_Framework.h"
#include "ADPotService.h"
#include "PIC32_AD_Lib.h"
/*----------------------------- Module Defines ----------------------------*/
/*---------------------------- Module Functions ---------------------------*/
/* prototypes for private functions for this service.They should be functions
relevant to the behavior of this service
*/
/*---------------------------- Module Variables ---------------------------*/
// with the introduction of Gen2, we need a module level Priority variable
static uint8_t MyPriority;
uint32_t PotValue = 100;
uint32_t JoystickXValue = 0; // AN0
uint32_t JoystickYValue = 0; // AN1
uint32_t adcResults[3];
/*------------------------------ Module Code ------------------------------*/
/****************************************************************************
Function
InitTemplateService
Parameters
uint8_t : the priorty of this service
Returns
bool, false if error in initialization, true otherwise
Description
Saves away the priority, and does any
other required initialization for this service
Notes
Author
J. Edward Carryer, 01/16/12, 10:00
****************************************************************************/
bool InitADService(uint8_t Priority)
{
ES_Event_t ThisEvent;
MyPriority = Priority;
ThisEvent.EventType = ES_INIT;
ANSELBbits.ANSB14 = 1;
TRISBbits.TRISB14 = 1;
ANSELAbits.ANSA0 = 1;
TRISAbits.TRISA0 = 1;
ANSELAbits.ANSA1 = 1;
TRISAbits.TRISA1 = 1;
ES_Timer_InitTimer(AD_TIMER, 20);
// From PIC32 Datasheet, want to set the pin to be reading ADC here
ADC_ConfigAutoScan(BIT10HI | BIT0HI | BIT1HI);
if (ES_PostToService(MyPriority, ThisEvent) == true)
{
return true;
}
else
{
return false;
}
}
/****************************************************************************
Function
PostTemplateService
Parameters
EF_Event_t ThisEvent ,the event to post to the queue
Returns
bool false if the Enqueue operation failed, true otherwise
Description
Posts an event to this state machine's queue
Notes
Author
J. Edward Carryer, 10/23/11, 19:25
****************************************************************************/
bool PostADService(ES_Event_t ThisEvent)
{
return ES_PostToService(MyPriority, ThisEvent);
}
/****************************************************************************
Function
RunTemplateService
Parameters
ES_Event_t : the event to process
Returns
ES_Event, ES_NO_EVENT if no error ES_ERROR otherwise
Description
add your description here
Notes
Author
J. Edward Carryer, 01/15/12, 15:23
****************************************************************************/
ES_Event_t RunADService(ES_Event_t ThisEvent)
{
ES_Event_t ReturnEvent;
ReturnEvent.EventType = ES_NO_EVENT; // assume no errors
switch (ThisEvent.EventType) {
case ES_TIMEOUT:
ADC_MultiRead(adcResults);
JoystickXValue = adcResults[0]; // AN0 (RA0)
JoystickYValue = adcResults[1]; // AN1 (RA1)
PotValue = adcResults[2];
ES_Timer_InitTimer(AD_TIMER, 20);
break;
default:
break;
}
return ReturnEvent;
}
uint32_t readADC () {
return PotValue;
}
uint32_t GetJoystickXValue(void) {
return JoystickXValue;
}
uint32_t GetJoystickYValue(void) {
return JoystickYValue;
}
/*------------------------------ End of file ------------------------------*/
bool InitBARNXBeeService(uint8_t Priority)
{
ES_Event_t ThisEvent;
MyPriority = Priority;
Configure Input and Output pins;
Set up UART2 module with receive and transmit interrupts;
ThisEvent.EventType = ES_INIT;
if (ES_PostToService(MyPriority, ThisEvent) == true)
{
return true;
}
else
{
return false;
}
}
ES_Event_t RunBARNXBeeService(ES_Event_t ThisEvent)
{
ES_Event_t ReturnEvent;
ReturnEvent.EventType = ES_NO_EVENT; // assume no errors
switch(ThisEvent.EventType){
case ES_INIT:
case ES_TIMEOUT:
if (MESSAGE_TIMER times out) {
// Everytime the message timer times out, send a message (every 200 ms)
Construct a message according to API framework;
Trigger the interrupts;
}
else if (TIMEOUT_TIMER times out) {
// if the 4 second timer runs out, there has not been a message for 4 seconds
Reset to unpaired state;
}
break;
case MSG_RECV:
{
// Always start the 4 second time just in case
if (RX_BUF[0] == 0x81) {
// this means that message received is formatted properly
if (Status Byte is 2 (Pairing)) {
// Send 255 as a pairing confirmation
Store the Address of the received SPECTACOAL to send messages to;
Construct a message with 0xFF (255) as the data to send;
Trigger the interrupt to send the message with the constructed data package
}
if (Status Byte is 1 (Recharging)) {
if (The Address is the initial address that was initially paired with) {
Send a package with charge status;
Post the Recharge Event;
}
}
if (Status Byte is 0 (Driving)) {
if (The Address is the initial address that was initially paired with) {
// drive the motors
Store the Joystick values;
Store the button values into a single byte to decode
Post the Driving Event
if (The buttons have changed since the last message ) {
// if Buttons is 0, no anchor and no dump mechanism
// if Buttons is 1, deploy anchor
// if Buttons is 2, open dump mechanism
// if Buttons is 3, open dump mechanism and deploy anchor
Post a Button Change Event;
}
}
}
}
}
break;
case TX_REQUESTED:
// the barnacoal wants to send data to the spectacoal.
// check what kind of data it wants to send, then package it and send it over
{
Construct a Data Package using a helper function;
Send the message via interrupts;
}
break;
default:
break;
}
return ReturnEvent;
}
/***************************************************************************
private functions
***************************************************************************/
/////// RX and TX INTERRUPT ///////
void __ISR(_UART_2_VECTOR, IPL7SOFT) BarnISR(void)
{
__builtin_disable_interrupts();
// if we've received data, and are processing received data:
void __ISR(_UART_2_VECTOR,IPL7SOFT)UART2_ISR(void) {
__builtin_disable_interrupts();
// Handle the Rx Buffer first !
if (If the Receive Interrupt Flag is set) {
Write the Receive register into received;
Post a new event with the receive messages;
Clear the Receive Interrupt Flag;
// Do more with understanding if the bytes are correct
// Check the start delimiter and all the bytes to follow
// Index through the receive buffer and make sure the data is valid
}
// handle the Tx buffer now
else if (If Transmit Interrupts are enabled and the transmit interrupt flag is set) {
// do some fancy stuff with the interrupt handling to make sure the
// data is transmitted over nicely
// Make sure not to clear the transmit interrupt enable mask until
// the entire message is transmitted over
Clear Transmit Interrupt Flag;
}
__builtin_enable_interrupts();
}
bool ConstructTx (uint8_t DataToSend) {
bool returnVal = true;
First Byte is Start Delimiter;
Second and third Bytes are Length of Message;
Fourth Byte is the API Identifier;
Fifth Byte is Frame ID;
Sixth and Seventh Bytes are Address of Device to receive message;
Eighth Byte is set to 0x01;
Ninth Byte is Data;
Initialize Byte for CheckSum;
Calculate the value of the Checksum so that the data values sum to 0xFF;
return returnVal;
}/****************************************************************************
Module
BARNXBeeService.c
Revision
1.0.1
Description
This is a template file for implementing a simple service under the
Gen2 Events and Services Framework.
Notes
History
When Who What/Why
-------------- --- --------
01/16/12 09:58 jec began conversion from TemplateFSM.c
****************************************************************************/
/*----------------------------- Include Files -----------------------------*/
/* include header files for this state machine as well as any machines at the
next lower level in the hierarchy that are sub-machines to this machine
*/
#include "ES_Configure.h"
#include "ES_Framework.h"
#include "TemplateService.h"
#include "BARNXBeeService.h"
#include "DriveService.h"
#include "BarnacoalFSM.h"
#include <sys/attribs.h>
#include "dbprintf.h"
#include <xc.h>
/*----------------------------- Module Defines ----------------------------*/
#define MAX_MESSAGE_SIZE 4
#define MAX_TX_BUF_SIZE MAX_MESSAGE_SIZE + 5
#define MAX_RX_BUF_SIZE MAX_MESSAGE_SIZE + 9
/*---------------------------- Module Functions ---------------------------*/
/* prototypes for private functions for this service.They should be functions
relevant to the behavior of this service
*/
/*---------------------------- Module Variables ---------------------------*/
// with the introduction of Gen2, we need a module level Priority variable
static uint8_t MyPriority;
// Setup for UART transmission between XBees
// buffers for Tx and Rx data
static uint8_t TX_BUF[13];
volatile static uint8_t RX_BUF[9];
volatile static uint8_t RxData;
// Tx and Rx ISR index counters to make sure the bytes being sent/received are correct
volatile static uint8_t idx_TX;
volatile static uint8_t idx_RX;
// Size that a current Tx / Rx will be
static uint8_t TxBufferSize = 10;
static uint8_t RxBufferSize = 13;
// Checksums sum of bytes in a Tx Message
static uint8_t TxByteSum;
volatile static uint8_t RxByteSum;
// Frame ID
static uint8_t FrameID;
// Boolean to track transmission of start delimiter
volatile static bool DelimiterFound = false;
// Union for access of bytes within the addresses
typedef union {
uint16_t Whole16;
uint8_t Byte[2];
}TwoBytes_t;
typedef union {
struct {
uint8_t Left;
uint8_t Right;
};
uint16_t Whole16;
} JoystickVals;
static TwoBytes_t TxAddress;
static TwoBytes_t RxAddress;
static TwoBytes_t RxMessage;
uint8_t PreviousButtons = 0;
uint8_t Buttons = 0;
// Boat Addresses
static uint16_t BARN_address = 0x2082;
uint8_t DataToSend = 0x00;
uint8_t Charge = 150;
/*------------------------------ Module Code ------------------------------*/
/****************************************************************************
Function
InitBARNXBeeService
Parameters
uint8_t : the priorty of this service
Returns
bool, false if error in initialization, true otherwise
Description
Saves away the priority, and does any
other required initialization for this service
Notes
Author
J. Edward Carryer, 01/16/12, 10:00
****************************************************************************/
bool InitBARNXBeeService(uint8_t Priority)
{
ES_Event_t ThisEvent;
MyPriority = Priority;
PreviousButtons = 0;
// post the initial transition event
TRISBbits.TRISB11 = 1; // --> Configure pin B11/22 for inputs Rx, using UART2 module
U2RXR = 0b0011;
TRISAbits.TRISA3 = 0; //--> Configure pin A3/10 for outputs Tx
RPA3R = 0b0010;
DelimiterFound = false;
RxBufferSize = MAX_RX_BUF_SIZE;
TRISBbits.TRISB15 = 0; // initialize pin to drive LED when Rx buffer fills
ANSELBbits.ANSB15 = 0; // set B15, pin 26, to digital output
LATBbits.LATB15 = 0; // set it LOW
/* Set up UART2 Module */
// Disable UART2
U2MODEbits.ON = 0;
// Configure the UXMODE register to clear the SIDL, IREN, RTSMD,
// UEN, WAKE, LPBACK, ABAUD, RXINV
U2MODEbits.SIDL = 0;
U2MODEbits.IREN = 0;
U2MODEbits.RTSMD = 1;
U2MODEbits.WAKE = 0;
U2MODEbits.LPBACK = 0;
U2MODEbits.ABAUD = 0;
U2MODEbits.UEN = 0b00;
U2MODEbits.RXINV = 0;
// Configure the UXMODE register to choose high speed or low speed baud clock
U2MODEbits.BRGH = 0;
// Configure the UXMODE register to choose the number of data bits, stop bits, and parity
// 8 bit data, no parity
U2MODEbits.PDSEL = 0b00;
// one stop bit
U2MODEbits.STSEL = 0;
// Configure the UXSTA register to clear the UXINTV, UTXBRK and ADDEN bits
U2STAbits.UTXINV = 0;
U2STAbits.UTXBRK = 0;
U2STAbits.ADDEN = 0;
U2STAbits.ADM_EN = 0;
U2STAbits.URXISEL = 0b00;
U2STAbits.UTXISEL = 0b00;
// Enable the receiver
U2STAbits.URXEN = 1;
// Enable the transmitter
U2STAbits.UTXEN = 1;
// Baud Rate of 9600
U2BRG = 129;
U2TXREG;
U2RXREG;
IFS1CLR = _IFS1_U2RXIF_MASK;
IFS1CLR = _IFS1_U2TXIF_MASK;
IEC1bits.U2RXIE = 1; // Enable UART2 RX interrupt
IEC1bits.U2TXIE = 0;
IPC9bits.U2IP = 7; // Set priority
U2MODEbits.ON = 1;
// Enable input capture and global interrupts;
__builtin_enable_interrupts();
ThisEvent.EventType = ES_INIT;
if (ES_PostToService(MyPriority, ThisEvent) == true)
{
return true;
}
else
{
return false;
}
}
/****************************************************************************
Function
PostBARNXBeeService
Parameters
EF_Event_t ThisEvent ,the event to post to the queue
Returns
bool false if the Enqueue operation failed, true otherwise
Description
Posts an event to this state machine's queue
Notes
Author
J. Edward Carryer, 10/23/11, 19:25
****************************************************************************/
bool PostBARNXBeeService(ES_Event_t ThisEvent)
{
return ES_PostToService(MyPriority, ThisEvent);
}
/****************************************************************************
Function
RunBARNXBeeService
Parameters
ES_Event_t : the event to process
Returns
ES_Event, ES_NO_EVENT if no error ES_ERROR otherwise
Description
add your description here
Notes
Author
J. Edward Carryer, 01/15/12, 15:23
****************************************************************************/
ES_Event_t RunBARNXBeeService(ES_Event_t ThisEvent)
{
ES_Event_t ReturnEvent;
ReturnEvent.EventType = ES_NO_EVENT; // assume no errors
switch(ThisEvent.EventType){
case ES_INIT:
LATBbits.LATB15 = 0;
break;
case ES_TIMEOUT:
if (ThisEvent.EventParam == MESSAGE_TIMER) {
DB_printf("Data To Send %u\n", DataToSend);
ConstructTx(DataToSend);
idx_TX = 0;
IFS1SET = _IFS1_U2TXIF_MASK;
IEC1SET = _IEC1_U2TXIE_MASK;
}
else if (ThisEvent.EventParam == TIMEOUT_TIMER) {
ES_Event_t NewEvent;
NewEvent.EventType = ES_ENDOFTIME;
PostBarnacoalFSM(NewEvent);
}
break;
case MSG_RECV:
{
DB_printf("Message Received\n");
ES_Timer_InitTimer(TIMEOUT_TIMER, 4000);
if (RX_BUF[0] == 0x81) {
// Status Byte == 2, this means that it is pairing
if (RX_BUF[5] == 0x02) {
// Send 255 as a pairing confirmation
RxAddress.Byte[1] = RX_BUF[1];
RxAddress.Byte[0] = RX_BUF[2];
TxAddress.Whole16 = RxAddress.Whole16;
DB_printf("This is the Receive Address 0x%x\n", TxAddress.Whole16);
DataToSend = 0xFF;
ConstructTx(DataToSend);
idx_TX = 0;
IFS1SET = _IFS1_U2TXIF_MASK;
IEC1SET = _IEC1_U2TXIE_MASK;
ES_Event_t NewEvent;
NewEvent.EventType = PAIR_REQUEST;
ES_PostAll(NewEvent);
}
// Status Byte == 1, this means that it is recharging
if (RX_BUF[5] == 0x01) {
if (RxAddress.Byte[1] == RX_BUF[1] && RxAddress.Byte[0] == RX_BUF[2]) {
// send a package with charge status
ES_Event_t RechargeEvent;
RechargeEvent.EventType = ES_RECHARGE;
ES_PostAll(RechargeEvent);
}
}
if (RX_BUF[5] == 0x00) {
if (RxAddress.Byte[1] == RX_BUF[1] && RxAddress.Byte[0] == RX_BUF[2]) {
// drive the motors
JoystickVals joystick;
// Left is vertical / Thrust
joystick.Left = RX_BUF[7];
// Right is Horizontal / Direction
joystick.Right = RX_BUF[6];
Buttons = RX_BUF[8];
ES_Event_t DriveEvent;
DriveEvent.EventType = ES_DRIVE;
DriveEvent.EventParam = joystick.Whole16;
ES_PostAll(DriveEvent);
if (PreviousButtons != Buttons) {
// if Buttons is 0, no anchor and no dump mechanism
// if Buttons is 1, deploy anchor
// if Buttons is 2, open dump mechanism
// if Buttons is 3, open dump mechanism and deploy anchor
DB_printf("Button is being pressed\n");
ES_Event_t ButtonEvent;
ButtonEvent.EventType = ES_BUTTONCHANGE;
ButtonEvent.EventParam = Buttons;
ES_PostAll(ButtonEvent);
PreviousButtons = Buttons;
}
}
}
}
}
break;
case TX_REQUESTED:
// the barnacoal wants to send data to the spectacoal.
// check what kind of data it wants to send, then package it and send it over
{
DataToSend = ThisEvent.EventParam;
ConstructTx(DataToSend);
idx_TX = 0;
IFS1SET = _IFS1_U2TXIF_MASK;
IEC1SET = _IEC1_U2TXIE_MASK;
// for (int i = 0; i < TxBufferSize; i++) {
// while (U2STAbits.UTXBF == 1);
// DB_printf("#%d Tx_Bug %x\n",i,TX_BUF[i]);
// U2TXREG = TX_BUF[i];
//// ES_Timer_InitTimer(MESSAGE_TIMER, 200);
// }
}
break;
default:
break;
}
return ReturnEvent;
}
/***************************************************************************
private functions
***************************************************************************/
/////// RX and TX INTERRUPT ///////
void __ISR(_UART_2_VECTOR, IPL7SOFT) BarnISR(void)
{
__builtin_disable_interrupts();
// if we've received data, and are processing received data:
if (IFS1bits.U2RXIF && IEC1bits.U2RXIE) // if interrupt flag has been raised
{
LATBbits.LATB15 = 1; // turn on the LED for 0.5s
ES_Timer_InitTimer(LED_PULSE, 500);
RxData = U2RXREG; // read from Rx buffer and put into RxData
IFS1CLR = _IFS1_U2RXIF_MASK;
if (!DelimiterFound && RxData == 0x7E) {
DelimiterFound = true;
idx_RX = 0;
RxByteSum = 0;
}
if (DelimiterFound) {
if (idx_RX == 0) {
// This is just to check that the first byte is the start delimiter
}
else if (idx_RX == 1) {
RxMessage.Byte[1] = RxData;
}
else if (idx_RX == 2) {
RxMessage.Byte[0] = RxData;
if (RxMessage.Whole16 == 0 || RxMessage.Whole16 > MAX_TX_BUF_SIZE) {
DelimiterFound = false;
idx_RX = 0;
RxByteSum = 0;
}
else {
RxBufferSize = RxMessage.Whole16;
}
}
else if (idx_RX < (RxBufferSize + 3)) {
RX_BUF[idx_RX - 3] = RxData;
RxByteSum += RxData;
}
else {
uint8_t CheckSumVal = RxByteSum + RxData;
if (CheckSumVal == 0xFF) {
ES_Event_t DataToRX;
DataToRX.EventType = MSG_RECV;
DataToRX.EventParam = RX_BUF[0];
PostBARNXBeeService(DataToRX);
}
DelimiterFound = false;
idx_RX = 0;
RxByteSum = 0;
}
idx_RX ++;
}
}
else if (IFS1bits.U2TXIF && IEC1bits.U2TXIE) {
if (idx_TX < TxBufferSize) {
U2TXREG = TX_BUF[idx_TX];
idx_TX ++;
IFS1CLR = _IFS1_U2TXIF_MASK;
}
else {
IEC1CLR = _IEC1_U2TXIE_MASK;
idx_TX = 0;
}
}
__builtin_enable_interrupts();
}
bool ConstructTx (uint8_t DataToSend) {
__builtin_disable_interrupts();
bool returnVal = true;
TX_BUF[0] = 0x7E;
TX_BUF[1] = 0x00;
TX_BUF[2] = 0x06;
TX_BUF[3] = 0x01;
TX_BUF[4] = FrameID;
TX_BUF[5] = TxAddress.Byte[1]; // Address MSB
TX_BUF[6] = TxAddress.Byte[0]; // Address LSB
TX_BUF[7] = 0x01;
TX_BUF[8] = DataToSend;
TxByteSum = 0;
for (int idx = 3; idx < TxBufferSize - 1; idx++) {
TxByteSum += TX_BUF[idx];
}
TX_BUF[TxBufferSize - 1] = 0xFF - TxByteSum;
__builtin_enable_interrupts();
return returnVal;
}
/*------------------------------- Footnotes -------------------------------*/
/*------------------------------ End of file ------------------------------*//****************************************************************************
Template header file for Hierarchical Sate Machines AKA StateCharts
****************************************************************************/
#ifndef TopHSMTemplate_H
#define TopHSMTemplate_H
// State definitions for use with the query function
typedef enum { INIT_STATE, STATE_ONE, STATE_TWO, STATE_THREE, END_GAME } MasterState_t ;
// Public Function Prototypes
ES_Event_t RunMasterSM( ES_Event_t CurrentEvent );
void StartMasterSM ( ES_Event_t CurrentEvent );
bool PostMasterSM( ES_Event_t ThisEvent );
bool InitMasterSM ( uint8_t Priority );
#endif /*TopHSMTemplate_H */
bool InitBarnacoalFSM(uint8_t Priority)
{
ES_Event_t ThisEvent;
MyPriority = Priority;
Configure Input and Output pins;
Configure Pins for PWM;
// LEFT MOTOR
// RIGHT MOTOR
// DUMP MOTOR
// ANCHOR MOTOR
// TEAM NUMBER ROTATION MOTOR
// Timer2 setup
// Timer3 setup
// OC2 (Left motor)
// OC3 (Right motor)
// OC1 setup (dump motor)
// OC4 setup (anchor motor)
// OC5 setup (team number rotation motor)
CurrentState = InitPState;
// post the initial transition event
ThisEvent.EventType = ES_INIT;
if (ES_PostToService(MyPriority, ThisEvent) == true)
{
return true;
}
else
{
return false;
}
}
ES_Event_t RunBarnacoalFSM(ES_Event_t ThisEvent)
{
ES_Event_t ReturnEvent;
ReturnEvent.EventType = ES_NO_EVENT;
switch (CurrentState)
{
case InitPState:
{
if (Init Event)
{
Reset the Battery Charge Value;
Initialize the initial servo motor positions
}
}
break;
case Pairing:
{
switch (ThisEvent.EventType)
{
case PAIR_REQUEST:
// When Paired
{
CurrentState = Paired;
Set the servo motor for pairing to be right side up;
}
break;
default:
;
}
}
break;
case Paired: // we are in the driving state
{
switch (ThisEvent.EventType){
case ES_TIMEOUT:
{
}
break;
case ES_DRIVE:
{
if (Battery is Dead ) {
// make motor not go burrrrr
Turn Everything OFF;
}
else if (the Battery != dead and the joystick is not in neutral state +- dead zone) {
if (Battery has Charge) {
Decrement the battery value;
// Make motor go burrrrr
Left Jostick is Thrust/Speed;
Right Joystick is Direction/Turning;
// Calculations to adjust the motor values depending on how it should turn
double LeftDC = ThrustDC + DirectDC;
double RightDC = ThrustDC - DirectDC;
Make sure the joystick values maximize at 1 or -1;
Set direction and absolute value for PWM based on sign of value;
Drive the motors;
} else if (joystick is in dead zone) {
Turn Motors off;
}
Post an Event to send message to SPECTACOAL with battery level;
}
break;
case ES_BUTTONCHANGE: // posted from XBeeService
{
// Anchor and Dump Mechanism activated
ButtonVals is "Buttons" on BARNXBeeService;
if (BARNACOAL is not dead) {
switch(ButtonVals){
// if Button is 0, no anchor and no dump mechanism
// if Button is 1, deploy coal
// if Button is 2, deploy anchor
}
}
if (there is battery charge) {
Deplete the battery;
}
}
break;
case ES_RECHARGE:
// Recharge mode
{
if (If the battery is not full) {
if (BatteryCharge > 144) {
Battery cannot be greater than 150;
}
else {
Increment battery level by 6 every 200ms
}
}
else {
Battery is now full;
}
DO NOT DRIVE MOTORS;
Send a message to the SPECTACOAL that the battery is charging;
}
break;
case ES_ENDOFTIME:
{
If the timeout timer runs out, it resets to unpaired state;
}
break;
default:
break;
}
}
break;
} // end switch on Current State
return ReturnEvent;
}
/****************************************************************************
Module
BarnacoalFSM.c
Revision
1.0.1
Description
This is a file for implementing the BARNACOAL FSM under the
Gen2 Events and Services Framework.
Notes
History
When Who What/Why
-------------- --- --------
01/15/12 11:12 jec revisions for Gen2 framework
11/07/11 11:26 jec made the queue static
10/30/11 17:59 jec fixed references to CurrentEvent in RunTemplateSM()
10/23/11 18:20 jec began conversion from SMTemplate.c (02/20/07 rev)
****************************************************************************/
/*----------------------------- Include Files -----------------------------*/
/* include header files for this state machine as well as any machines at the
next lower level in the hierarchy that are sub-machines to this machine
*/
#include "ES_Configure.h"
#include "ES_Framework.h"
#include "BarnacoalFSM.h"
#include "BARNXBeeService.h"
#include "dbprintf.h"
/*----------------------------- Module Defines ----------------------------*/
#define PR_VAL 24999 // this is TIMER2 only!
#define UP 1
#define DOWN 0
/*---------------------------- Module Functions ---------------------------*/
/* prototypes for private functions for this machine.They should be functions
relevant to the behavior of this state machine
*/
/*---------------------------- Module Variables ---------------------------*/
// everybody needs a state variable, you may need others as well.
// type of state variable should match htat of enum in header file
static BarnState_t CurrentState;
// with the introduction of Gen2, we need a module level Priority var as well
static uint8_t MyPriority;
typedef union {
struct {
uint8_t Left;
uint8_t Right;
};
uint16_t Whole16;
} JoystickVals;
static uint8_t LeftJoystick = 127;
static uint8_t RightJoystick = 127;
static double ThrustDC = 0.0;
static double DirectDC = 0.0;
static double LeftDC = 0.0;
static double RightDC = 0.0;
uint8_t BatteryCharge = 150;
uint8_t ButtonVals = 0;
static uint8_t CoalIs = DOWN;
static uint8_t AnchorIs = DOWN;
static uint8_t TeamNumberIs = DOWN;
/*------------------------------ Module Code ------------------------------*/
/****************************************************************************
Function
InitBarnacoalFSM
Parameters
uint8_t : the priorty of this service
Returns
bool, false if error in initialization, true otherwise
Description
Saves away the priority, sets up the initial transition and does any
other required initialization for this state machine
Notes
Author
J. Edward Carryer, 10/23/11, 18:55
****************************************************************************/
bool InitBarnacoalFSM(uint8_t Priority)
{
ES_Event_t ThisEvent;
MyPriority = Priority;
// put us into the Initial PseudoState
/****************************************************************************
* motor control initialization
* ****************************************************************************/
TRISBbits.TRISB8 = 0; // Left polarity
TRISBbits.TRISB10 = 0; // Right polarity
// Set direction to default (LOW)
LATBbits.LATB8 = 0;
LATBbits.LATB10 = 0;
// Configure PWM output pins
// LEFT MOTOR
TRISBbits.TRISB5 = 0; // OC2 -> Left motor
RPB5R = 0b0101; // Map OC2 to RB5
// RIGHT MOTOR
TRISBbits.TRISB9 = 0; // OC3 -> Right motor
RPB9R = 0b0101; // Map OC3 to RB9
// DUMP MOTOR
TRISAbits.TRISA0 = 0; // set A0, pin 2 to output
ANSELAbits.ANSA0 = 1; // analog
RPA0R = 0b0101; // OC1 -> anchor motor
// ANCHOR MOTOR
TRISBbits.TRISB2 = 0; // set B2, pin 6 to output
ANSELBbits.ANSB2 = 1; // analog
RPB2R = 0b0101; // OC4 -> anchor servo motor
// TEAM NUMBER ROTATION MOTOR
TRISBbits.TRISB13 = 0; // set B13, pin 24 to output
ANSELBbits.ANSB13 = 1; // analog
RPB13R = 0b0110; // OC5 -> team number servo
// Timer2 setup
T2CONbits.ON = 0;
T2CONbits.TCS = 0;
T2CONbits.TCKPS = 0b010; // 1:4 prescaler
T2CONbits.TGATE = 0;
TMR2 = 0;
PR2 = PR_VAL;
T2CONbits.ON = 1;
// Timer3 setup
T3CONbits.ON = 0;
T3CONbits.TCS = 0;
T3CONbits.TCKPS = 0b011; // 1:8 prescaler
T3CONbits.TGATE = 0;
TMR3 = 0;
PR3 = 49999;
T3CONbits.ON = 1;
// OC2 (Left motor)
OC2CONbits.ON = 0;
OC2CONbits.OCM = 0b110;
OC2CONbits.OCTSEL = 0;
OC2R = 0;
OC2RS = 0;
OC2CONbits.ON = 1;
// OC3 (Right motor)
OC3CONbits.ON = 0;
OC3CONbits.OCM = 0b110;
OC3CONbits.OCTSEL = 0;
OC3R = 0;
OC3RS = 0;
OC3CONbits.ON = 1;
clrScrn();
// OC1 setup (dump motor)
OC1CONbits.ON = 0;
OC1CONbits.OCM = 0b110;
OC1CONbits.OCTSEL = 1; // assign OC1 to timer3
OC1R = 0;
OC1RS = 3500; // hold position when turned on
OC1CONbits.ON = 1;
// OC4 setup (anchor motor)
OC4CONbits.ON = 0;
OC4CONbits.OCM = 0b110;
OC4CONbits.OCTSEL = 1; // assign OC4 to timer3
OC4R = 0;
OC4RS = 0;
OC4CONbits.ON = 1;
// OC5 setup (team number rotation motor)
OC5CONbits.ON = 0;
OC5CONbits.OCM = 0b110;
OC5CONbits.OCTSEL = 1; // assign OC5 to timer3
OC5R = 0;
OC5RS = 0;
OC5CONbits.ON = 1;
CurrentState = InitPState;
// post the initial transition event
ThisEvent.EventType = ES_INIT;
if (ES_PostToService(MyPriority, ThisEvent) == true)
{
return true;
}
else
{
return false;
}
}
/****************************************************************************
Function
PostBarnacoalFSM
Parameters
EF_Event_t ThisEvent , the event to post to the queue
Returns
boolean False if the Enqueue operation failed, True otherwise
Description
Posts an event to this state machine's queue
Notes
Author
J. Edward Carryer, 10/23/11, 19:25
****************************************************************************/
bool PostBarnacoalFSM(ES_Event_t ThisEvent)
{
return ES_PostToService(MyPriority, ThisEvent);
}
/****************************************************************************
Function
RunBarnacoalFSM
Parameters
ES_Event_t : the event to process
Returns
ES_Event_t, ES_NO_EVENT if no error ES_ERROR otherwise
Description
add your description here
Notes
uses nested switch/case to implement the machine.
Author
J. Edward Carryer, 01/15/12, 15:23
****************************************************************************/
ES_Event_t RunBarnacoalFSM(ES_Event_t ThisEvent)
{
ES_Event_t ReturnEvent;
ReturnEvent.EventType = ES_NO_EVENT; // assume no errors
switch (CurrentState)
{
case InitPState: // If current state is initial Psedudo State
{
if (ThisEvent.EventType == ES_INIT) // only respond to ES_Init
{
// nothing much to do here
// now put the machine into the actual initial state
BatteryCharge = 150;
CurrentState = Pairing;
OC2RS = 0;
OC5RS = 1400; // keep team number upside down
}
}
break;
case Pairing:
{
switch (ThisEvent.EventType)
{
case PAIR_REQUEST:
{
CurrentState = Paired;
DB_printf("paired");
OC5RS = 6000; // right side up!
}
break;
// repeat cases as required for relevant events
default:
;
}
}
break;
case Paired: // we are in the driving state
{
switch (ThisEvent.EventType){
case ES_TIMEOUT:
{
}
break;
case ES_DRIVE:
{
JoystickVals joystick;
joystick.Whole16 = ThisEvent.EventParam;
// DB_printf("This is the JoystickVals %u %u\n", joystick.Left, joystick.Right);
if (BatteryCharge == 0) {
// no more battery left
// make motor not go burrrrr
DB_printf("THE MOTOR IS DEAD \n");
OC2RS = 0;
OC3RS = 0;
LATBbits.LATB8 = 0; // Left polarity
LATBbits.LATB10 = 0; // Right polarity
}
else if ((joystick.Left < 125) || (joystick.Left > 129) || (joystick.Right < 125) || (joystick.Right > 129)) {
if (BatteryCharge > 0) {
BatteryCharge -= 1;
DB_printf("DRIVE MODE: %u\n", BatteryCharge);
// Make motor go burrrrr
LeftJoystick = joystick.Left;
RightJoystick = joystick.Right;
DB_printf("This is the Pot Value: %u%% %u%%\n", LeftJoystick, RightJoystick);
ThrustDC = (((double)LeftJoystick - 127.0)) / 128.0;
DirectDC = ((double)RightJoystick - 127.0) / 128.0;
double LeftDC = ThrustDC + DirectDC;
double RightDC = ThrustDC - DirectDC;
if (LeftDC > 1) {
LeftDC = 1;
}
if (RightDC > 1) {
RightDC = 1;
}
else if (LeftDC < -1) {
LeftDC = -1;
} else if (RightDC < -1) {
RightDC = -1;
}
// Set direction and absolute value for PWM
if (LeftDC >= 0) {
LATBbits.LATB8 = 0;
} else {
LATBbits.LATB8 = 1;
LeftDC = 1 + LeftDC;
}
if (RightDC >= 0) {
LATBbits.LATB10 = 0;
} else {
LATBbits.LATB10 = 1;
RightDC = 1 + RightDC;
}
uint16_t LeftThrustPercent = (uint16_t)(LeftDC * 100.0);
uint16_t RightThrustPercent = (uint16_t)(RightDC * 100.0);
DB_printf("This is the Thrust Value: %u%% %u%%\n", LeftThrustPercent, RightThrustPercent);
OC2RS = ((LeftDC) * (double)PR_VAL);
OC3RS = ((RightDC) * (double)PR_VAL);
} else {
OC2RS = 0;
OC3RS = 0;
}
} else if ((joystick.Left > 125) && (joystick.Left < 129) && (joystick.Right > 125) && (joystick.Right < 129)) {
OC2RS = 0; // right motor
OC3RS = 0; // left motor
LATBbits.LATB8 = 0; // Left polarity
LATBbits.LATB10 = 0; // Right polarity
}
ES_Event_t NewEvent;
NewEvent.EventType = TX_REQUESTED;
NewEvent.EventParam = BatteryCharge;
ES_PostAll(NewEvent);
}
break;
case ES_BUTTONCHANGE: // posted from XBeeService
{
// Anchor and Dump Mechanism activated
ButtonVals = ThisEvent.EventParam; // aka "Buttons" on BARNXBeeService
DB_printf("The button is changed: Button %u\n", ButtonVals);
if (BatteryCharge > 0) {
switch(ButtonVals){
// if Button is 0, no anchor and no dump mechanism
case 0:{
}
break;
// if Button is 1, deploy coal
case 1:{
if(CoalIs == UP){
// bring it up
OC1RS = 3500; //2400
CoalIs = DOWN;
DB_printf("down\n");
} else
{
// bring it down/deploy
OC1RS = 5550; //5550
CoalIs = UP;
}
}
break;
// if Button is 2, deploy anchor
case 2:{
if(AnchorIs == UP){
// bring it up
OC4RS = 2000;
AnchorIs = DOWN;
DB_printf("down\n");
} else
{
// bring it down/deploy
OC4RS = 4500;
AnchorIs = UP;
}
}
break;
// if Button is 3, open dump mechanism and deploy anchor
// but this should not happen so we will ignore it
}
}
if (BatteryCharge > 0) {
BatteryCharge -= 1;
}
}
break;
case ES_RECHARGE:
{
if (BatteryCharge < 150) {
if (BatteryCharge > 144) {
BatteryCharge = 150;
}
else {
BatteryCharge += 6;
}
DB_printf("Battery Charge: %u\n", BatteryCharge);
}
else {
DB_printf("Battery Full \n");
}
OC2RS = 0;
OC3RS = 0;
LATBbits.LATB8 = 0; // Left polarity
LATBbits.LATB10 = 0; // Right polarity
ES_Event_t NewEvent;
NewEvent.EventType = TX_REQUESTED;
NewEvent.EventParam = BatteryCharge;
ES_PostAll(NewEvent);
}
break;
case ES_ENDOFTIME:
{
DB_printf("TIMEOUT\n");
ES_Event_t NewEvent;
NewEvent.EventType = ES_INIT;
PostBarnacoalFSM(NewEvent);
CurrentState = InitPState;
}
break;
default:
break;
}
}
break;
} // end switch on Current State
return ReturnEvent;
}
/****************************************************************************
Function
QueryBarnacoalSM
Parameters
None
Returns
BarnState_t The current state of the BARNACOAL state machine
Description
returns the current state of the BARNACOAL state machine
Notes
Author
J. Edward Carryer, 10/23/11, 19:21
****************************************************************************/
BarnState_t QueryBarnacoalFSM(void)
{
return CurrentState;
}
/***************************************************************************
private functions
***************************************************************************/
#ifndef CommunicationService_H
#define CommunicationService_H
#include <stdint.h>
#include <stdbool.h>
#include "ES_Events.h"
#include "ES_Port.h" // needed for definition of REENTRANT
// Public Function Prototypes
typedef enum
{
AwaitingGameCommand,
SendingCommand,
AwaitingActionCompletion,
AligningBeacon,
} CommunicationServiceState_t;
bool InitCommunicationService(uint8_t Priority);
bool PostCommunicationService(ES_Event_t ThisEvent);
ES_Event_t RunCommunicationService(ES_Event_t ThisEvent);
#endif /* ServTemplate_H */